 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow to talk so your robot will learn: Instructions, descriptions, and pragmatics
Jun 16, 2022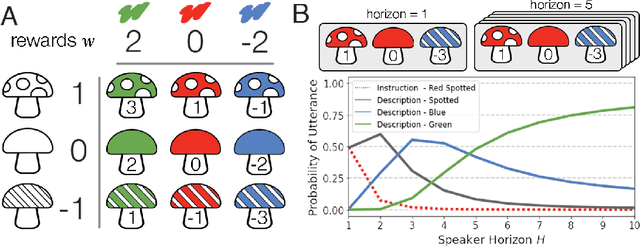
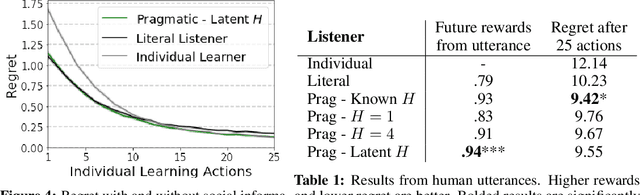
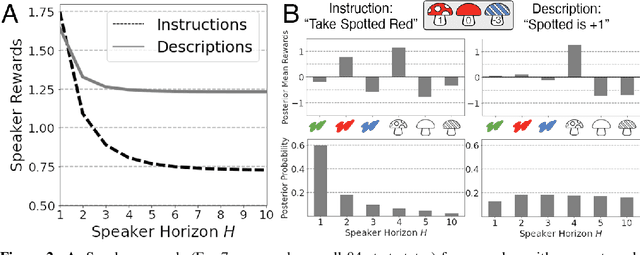
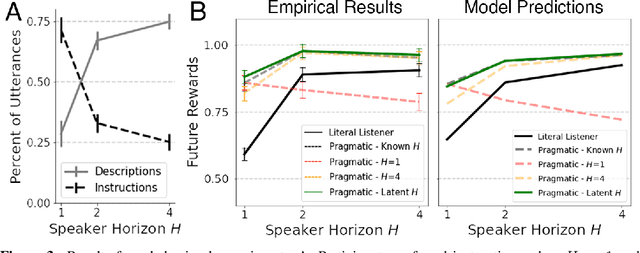
From the earliest years of our lives, humans use language to express our beliefs and desires. Being able to talk to artificial agents about our preferences would thus fulfill a central goal of value alignment. Yet today, we lack computational models explaining such flexible and abstract language use. To address this challenge, we consider social learning in a linear bandit setting and ask how a human might communicate preferences over behaviors (i.e. the reward function). We study two distinct types of language: instructions, which provide information about the desired policy, and descriptions, which provide information about the reward function. To explain how humans use these forms of language, we suggest they reason about both known present and unknown future states: instructions optimize for the present, while descriptions generalize to the future. We formalize this choice by extending reward design to consider a distribution over states. We then define a pragmatic listener agent that infers the speaker's reward function by reasoning about how the speaker expresses themselves. We validate our models with a behavioral experiment, demonstrating that (1) our speaker model predicts spontaneous human behavior, and (2) our pragmatic listener is able to recover their reward functions. Finally, we show that in traditional reinforcement learning settings, pragmatic social learning can integrate with and accelerate individual learning. Our findings suggest that social learning from a wider range of language -- in particular, expanding the field's present focus on instructions to include learning from descriptions -- is a promising approach for value alignment and reinforcement learning more broadly.
Interactive Learning from Policy-Dependent Human Feedback
Jan 21, 2017

For agents and robots to become more useful, they must be able to quickly learn from non-technical users. This paper investigates the problem of interactively learning behaviors communicated by a human teacher using positive and negative feedback. Much previous work on this problem has made the assumption that people provide feedback for decisions that is dependent on the behavior they are teaching and is independent from the learner's current policy. We present empirical results that show this assumption to be false---whether human trainers give a positive or negative feedback for a decision is influenced by the learner's current policy. We argue that policy-dependent feedback, in addition to being commonplace, enables useful training strategies from which agents should benefit. Based on this insight, we introduce Convergent Actor-Critic by Humans (COACH), an algorithm for learning from policy-dependent feedback that converges to a local optimum. Finally, we demonstrate that COACH can successfully learn multiple behaviors on a physical robot, even with noisy image features.