 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecHW: Heterogeneous Decentralized Federated Learning Exploiting Second-Order Information
Jan 16, 2026Decentralized Federated Learning (DFL) is a serverless collaborative machine learning paradigm where devices collaborate directly with neighbouring devices to exchange model information for learning a generalized model. However, variations in individual experiences and different levels of device interactions lead to data and model initialization heterogeneities across devices. Such heterogeneities leave variations in local model parameters across devices that leads to slower convergence. This paper tackles the data and model heterogeneity by explicitly addressing the parameter level varying evidential credence across local models. A novel aggregation approach is introduced that captures these parameter variations in local models and performs robust aggregation of neighbourhood local updates. Specifically, consensus weights are generated via approximation of second-order information of local models on their local datasets. These weights are utilized to scale neighbourhood updates before aggregating them into global neighbourhood representation. In extensive experiments with computer vision tasks, the proposed approach shows strong generalizability of local models at reduced communication costs.
The Built-In Robustness of Decentralized Federated Averaging to Bad Data
Feb 25, 2025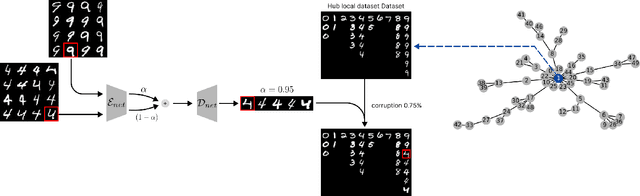
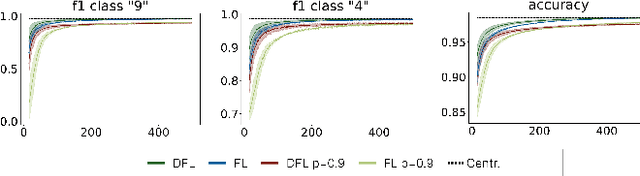
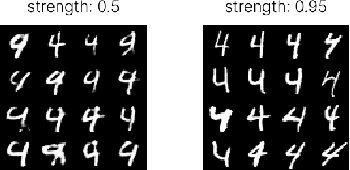
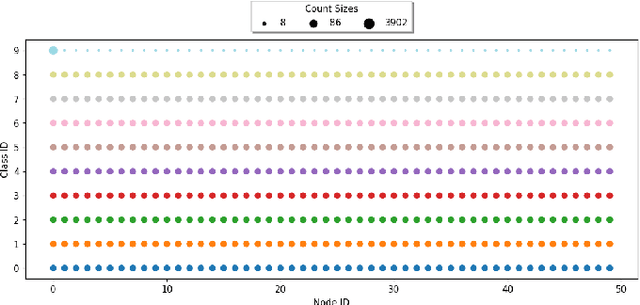
Decentralized federated learning (DFL) enables devices to collaboratively train models over complex network topologies without relying on a central controller. In this setting, local data remains private, but its quality and quantity can vary significantly across nodes. The extent to which a fully decentralized system is vulnerable to poor-quality or corrupted data remains unclear, but several factors could contribute to potential risks. Without a central authority, there can be no unified mechanism to detect or correct errors, and each node operates with a localized view of the data distribution, making it difficult for the node to assess whether its perspective aligns with the true distribution. Moreover, models trained on low-quality data can propagate through the network, amplifying errors. To explore the impact of low-quality data on DFL, we simulate two scenarios with degraded data quality -- one where the corrupted data is evenly distributed in a subset of nodes and one where it is concentrated on a single node -- using a decentralized implementation of FedAvg. Our results reveal that averaging-based decentralized learning is remarkably robust to localized bad data, even when the corrupted data resides in the most influential nodes of the network. Counterintuitively, this robustness is further enhanced when the corrupted data is concentrated on a single node, regardless of its centrality in the communication network topology. This phenomenon is explained by the averaging process, which ensures that no single node -- however central -- can disproportionately influence the overall learning process.
Robustness of Decentralised Learning to Nodes and Data Disruption
May 03, 2024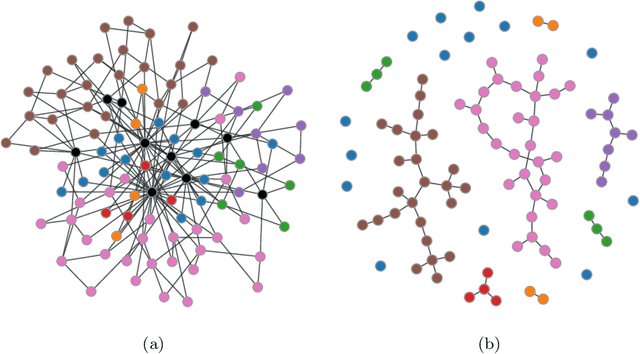

In the vibrant landscape of AI research, decentralised learning is gaining momentum. Decentralised learning allows individual nodes to keep data locally where they are generated and to share knowledge extracted from local data among themselves through an interactive process of collaborative refinement. This paradigm supports scenarios where data cannot leave local nodes due to privacy or sovereignty reasons or real-time constraints imposing proximity of models to locations where inference has to be carried out. The distributed nature of decentralised learning implies significant new research challenges with respect to centralised learning. Among them, in this paper, we focus on robustness issues. Specifically, we study the effect of nodes' disruption on the collective learning process. Assuming a given percentage of "central" nodes disappear from the network, we focus on different cases, characterised by (i) different distributions of data across nodes and (ii) different times when disruption occurs with respect to the start of the collaborative learning task. Through these configurations, we are able to show the non-trivial interplay between the properties of the network connecting nodes, the persistence of knowledge acquired collectively before disruption or lack thereof, and the effect of data availability pre- and post-disruption. Our results show that decentralised learning processes are remarkably robust to network disruption. As long as even minimum amounts of data remain available somewhere in the network, the learning process is able to recover from disruptions and achieve significant classification accuracy. This clearly varies depending on the remaining connectivity after disruption, but we show that even nodes that remain completely isolated can retain significant knowledge acquired before the disruption.
Optimizing Risk-averse Human-AI Hybrid Teams
Mar 13, 2024



We anticipate increased instances of humans and AI systems working together in what we refer to as a hybrid team. The increase in collaboration is expected as AI systems gain proficiency and their adoption becomes more widespread. However, their behavior is not error-free, making hybrid teams a very suitable solution. As such, we consider methods for improving performance for these teams of humans and AI systems. For hybrid teams, we will refer to both the humans and AI systems as agents. To improve team performance over that seen for agents operating individually, we propose a manager which learns, through a standard Reinforcement Learning scheme, how to best delegate, over time, the responsibility of taking a decision to any of the agents. We further guide the manager's learning so they also minimize how many changes in delegation are made resulting from undesirable team behavior. We demonstrate the optimality of our manager's performance in several grid environments which include failure states which terminate an episode and should be avoided. We perform our experiments with teams of agents with varying degrees of acceptable risk, in the form of proximity to a failure state, and measure the manager's ability to make effective delegation decisions with respect to its own risk-based constraints, then compare these to the optimal decisions. Our results show our manager can successfully learn desirable delegations which result in team paths near/exactly optimal with respect to path length and number of delegations.
Impact of network topology on the performance of Decentralized Federated Learning
Feb 28, 2024



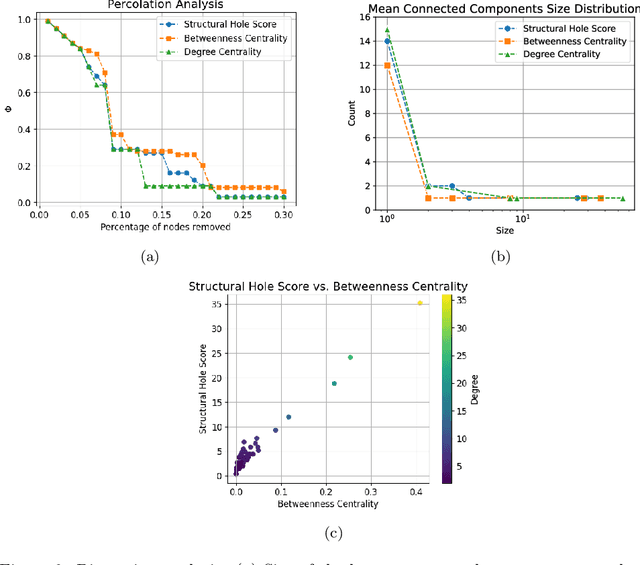
Fully decentralized learning is gaining momentum for training AI models at the Internet's edge, addressing infrastructure challenges and privacy concerns. In a decentralized machine learning system, data is distributed across multiple nodes, with each node training a local model based on its respective dataset. The local models are then shared and combined to form a global model capable of making accurate predictions on new data. Our exploration focuses on how different types of network structures influence the spreading of knowledge - the process by which nodes incorporate insights gained from learning patterns in data available on other nodes across the network. Specifically, this study investigates the intricate interplay between network structure and learning performance using three network topologies and six data distribution methods. These methods consider different vertex properties, including degree centrality, betweenness centrality, and clustering coefficient, along with whether nodes exhibit high or low values of these metrics. Our findings underscore the significance of global centrality metrics (degree, betweenness) in correlating with learning performance, while local clustering proves less predictive. We highlight the challenges in transferring knowledge from peripheral to central nodes, attributed to a dilution effect during model aggregation. Additionally, we observe that central nodes exert a pull effect, facilitating the spread of knowledge. In examining degree distribution, hubs in Barabasi-Albert networks positively impact learning for central nodes but exacerbate dilution when knowledge originates from peripheral nodes. Finally, we demonstrate the formidable challenge of knowledge circulation outside of segregated communities.
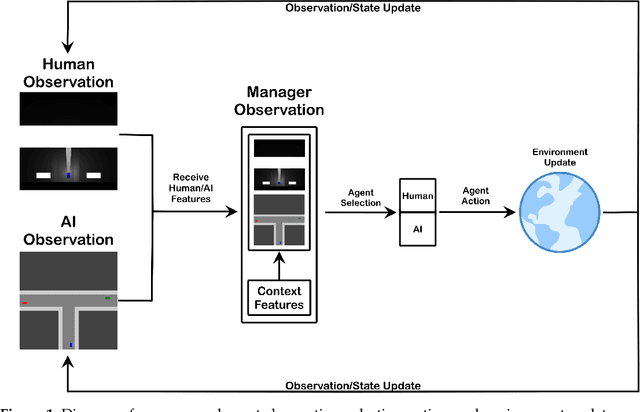
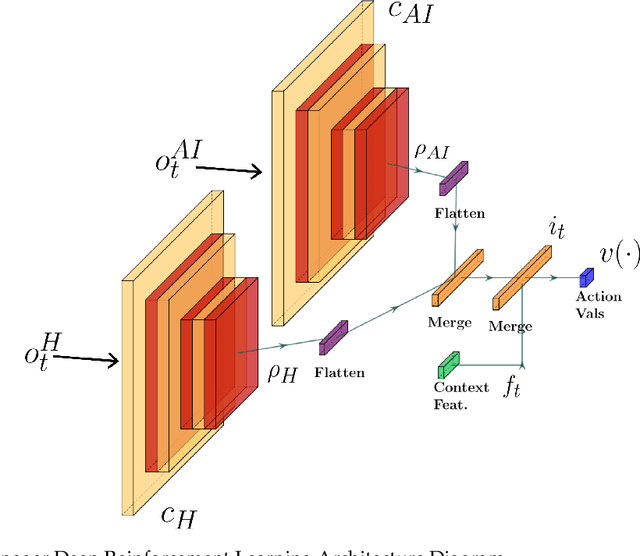
Optimizing Delegation in Collaborative Human-AI Hybrid Teams
Feb 08, 2024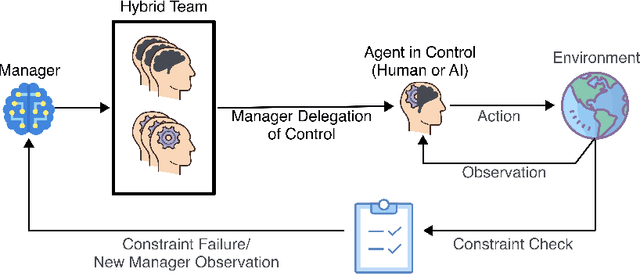


When humans and autonomous systems operate together as what we refer to as a hybrid team, we of course wish to ensure the team operates successfully and effectively. We refer to team members as agents. In our proposed framework, we address the case of hybrid teams in which, at any time, only one team member (the control agent) is authorized to act as control for the team. To determine the best selection of a control agent, we propose the addition of an AI manager (via Reinforcement Learning) which learns as an outside observer of the team. The manager learns a model of behavior linking observations of agent performance and the environment/world the team is operating in, and from these observations makes the most desirable selection of a control agent. We restrict the manager task by introducing a set of constraints. The manager constraints indicate acceptable team operation, so a violation occurs if the team enters a condition which is unacceptable and requires manager intervention. To ensure minimal added complexity or potential inefficiency for the team, the manager should attempt to minimize the number of times the team reaches a constraint violation and requires subsequent manager intervention. Therefore our manager is optimizing its selection of authorized agents to boost overall team performance while minimizing the frequency of manager intervention. We demonstrate our manager performance in a simulated driving scenario representing the case of a hybrid team of agents composed of a human driver and autonomous driving system. We perform experiments for our driving scenario with interfering vehicles, indicating the need for collision avoidance and proper speed control. Our results indicate a positive impact of our manager, with some cases resulting in increased team performance up to ~187% that of the best solo agent performance.
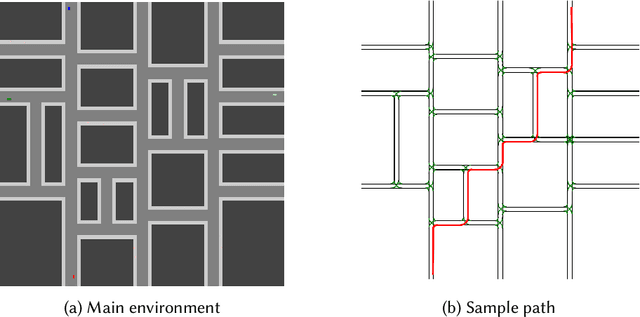
Exploring the Impact of Disrupted Peer-to-Peer Communications on Fully Decentralized Learning in Disaster Scenarios
Oct 04, 2023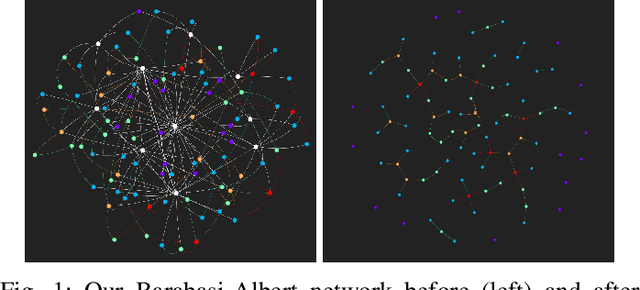
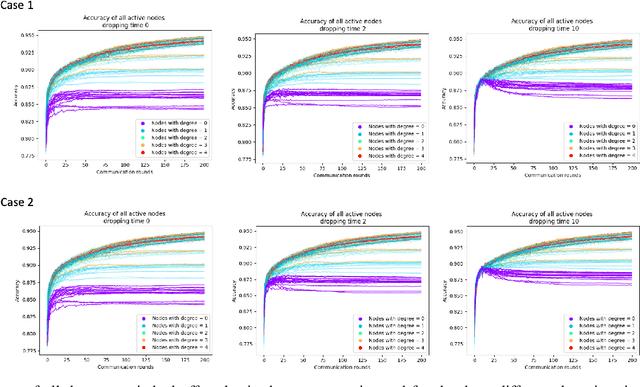
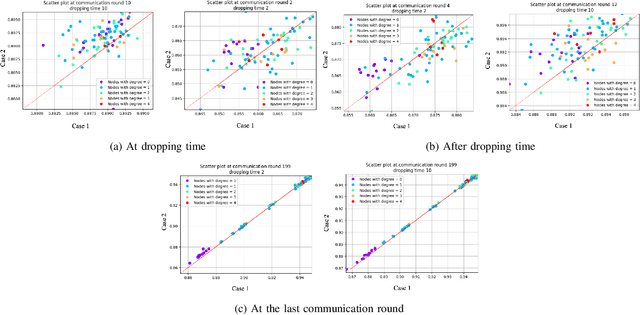
Fully decentralized learning enables the distribution of learning resources and decision-making capabilities across multiple user devices or nodes, and is rapidly gaining popularity due to its privacy-preserving and decentralized nature. Importantly, this crowdsourcing of the learning process allows the system to continue functioning even if some nodes are affected or disconnected. In a disaster scenario, communication infrastructure and centralized systems may be disrupted or completely unavailable, hindering the possibility of carrying out standard centralized learning tasks in these settings. Thus, fully decentralized learning can help in this case. However, transitioning from centralized to peer-to-peer communications introduces a dependency between the learning process and the topology of the communication graph among nodes. In a disaster scenario, even peer-to-peer communications are susceptible to abrupt changes, such as devices running out of battery or getting disconnected from others due to their position. In this study, we investigate the effects of various disruptions to peer-to-peer communications on decentralized learning in a disaster setting. We examine the resilience of a decentralized learning process when a subset of devices drop from the process abruptly. To this end, we analyze the difference between losing devices holding data, i.e., potential knowledge, vs. devices contributing only to the graph connectivity, i.e., with no data. Our findings on a Barabasi-Albert graph topology, where training data is distributed across nodes in an IID fashion, indicate that the accuracy of the learning process is more affected by a loss of connectivity than by a loss of data. Nevertheless, the network remains relatively robust, and the learning process can achieve a good level of accuracy.
Optimizing delegation between human and AI collaborative agents
Sep 26, 2023



In the context of humans operating with artificial or autonomous agents in a hybrid team, it is essential to accurately identify when to authorize those team members to perform actions. Given past examples where humans and autonomous systems can either succeed or fail at tasks, we seek to train a delegating manager agent to make delegation decisions with respect to these potential performance deficiencies. Additionally, we cannot always expect the various agents to operate within the same underlying model of the environment. It is possible to encounter cases where the actions and transitions would vary between agents. Therefore, our framework provides a manager model which learns through observations of team performance without restricting agents to matching dynamics. Our results show our manager learns to perform delegation decisions with teams of agents operating under differing representations of the environment, significantly outperforming alternative methods to manage the team.
Compensating for Sensing Failures via Delegation in Human-AI Hybrid Systems
Mar 17, 2023

Given an increasing prevalence of intelligent systems capable of autonomous actions or augmenting human activities, it is important to consider scenarios in which the human, autonomous system, or both can exhibit failures as a result of one of several contributing factors (e.g. perception). Failures for either humans or autonomous agents can lead to simply a reduced performance level, or a failure can lead to something as severe as injury or death. For our topic, we consider the hybrid human-AI teaming case where a managing agent is tasked with identifying when to perform a delegation assignment and whether the human or autonomous system should gain control. In this context, the manager will estimate its best action based on the likelihood of either (human, autonomous) agent failure as a result of their sensing capabilities and possible deficiencies. We model how the environmental context can contribute to, or exacerbate, the sensing deficiencies. These contexts provide cases where the manager must learn to attribute capabilities to suitability for decision-making. As such, we demonstrate how a Reinforcement Learning (RL) manager can correct the context-delegation association and assist the hybrid team of agents in outperforming the behavior of any agent working in isolation.
Modeling Human Behavior Part I -- Learning and Belief Approaches
May 13, 2022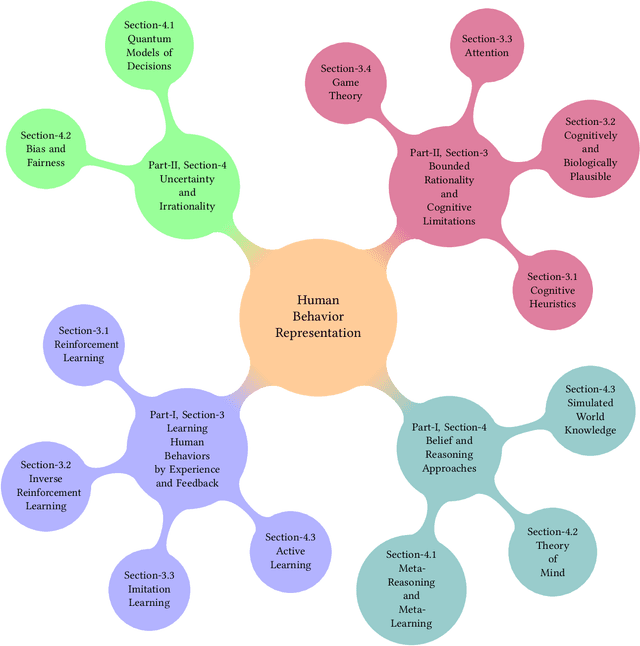

There is a clear desire to model and comprehend human behavior. Trends in research covering this topic show a clear assumption that many view human reasoning as the presupposed standard in artificial reasoning. As such, topics such as game theory, theory of mind, machine learning, etc. all integrate concepts which are assumed components of human reasoning. These serve as techniques to attempt to both replicate and understand the behaviors of humans. In addition, next generation autonomous and adaptive systems will largely include AI agents and humans working together as teams. To make this possible, autonomous agents will require the ability to embed practical models of human behavior, which allow them not only to replicate human models as a technique to "learn", but to to understand the actions of users and anticipate their behavior, so as to truly operate in symbiosis with them. The main objective of this paper it to provide a succinct yet systematic review of the most important approaches in two areas dealing with quantitative models of human behaviors. Specifically, we focus on (i) techniques which learn a model or policy of behavior through exploration and feedback, such as Reinforcement Learning, and (ii) directly model mechanisms of human reasoning, such as beliefs and bias, without going necessarily learning via trial-and-error.