 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Delegation in Collaborative Human-AI Hybrid Teams
Paper and Code
Feb 08, 2024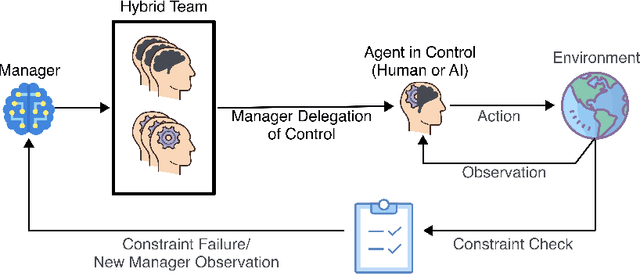

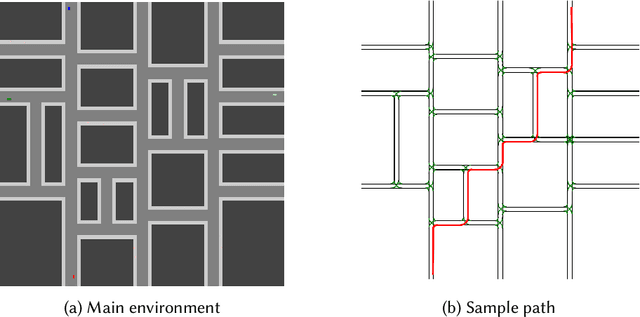

When humans and autonomous systems operate together as what we refer to as a hybrid team, we of course wish to ensure the team operates successfully and effectively. We refer to team members as agents. In our proposed framework, we address the case of hybrid teams in which, at any time, only one team member (the control agent) is authorized to act as control for the team. To determine the best selection of a control agent, we propose the addition of an AI manager (via Reinforcement Learning) which learns as an outside observer of the team. The manager learns a model of behavior linking observations of agent performance and the environment/world the team is operating in, and from these observations makes the most desirable selection of a control agent. We restrict the manager task by introducing a set of constraints. The manager constraints indicate acceptable team operation, so a violation occurs if the team enters a condition which is unacceptable and requires manager intervention. To ensure minimal added complexity or potential inefficiency for the team, the manager should attempt to minimize the number of times the team reaches a constraint violation and requires subsequent manager intervention. Therefore our manager is optimizing its selection of authorized agents to boost overall team performance while minimizing the frequency of manager intervention. We demonstrate our manager performance in a simulated driving scenario representing the case of a hybrid team of agents composed of a human driver and autonomous driving system. We perform experiments for our driving scenario with interfering vehicles, indicating the need for collision avoidance and proper speed control. Our results indicate a positive impact of our manager, with some cases resulting in increased team performance up to ~187% that of the best solo agent performance.