 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA new approach for combined model class selection and parameters learning for auto-regressive neural models
Jan 24, 2026This work introduces a novel approach for the joint selection of model structure and parameter learning for nonlinear dynamical systems identification. Focusing on a specific Recurrent Neural Networks (RNNs) family, i.e., Nonlinear Auto-Regressive with eXogenous inputs Echo State Networks (NARXESNs), the method allows to simultaneously select the optimal model class and learn model parameters from data through a new set-membership (SM) based procedure. The results show the effectiveness of the approach in identifying parsimonious yet accurate models suitable for control applications. Moreover, the proposed framework enables a robust training strategy that explicitly accounts for bounded measurement noise and enhances model robustness by allowing data-consistent evaluation of simulation performance during parameter learning, a process generally NP-hard for models with autoregressive components.
Nonlinear MPC design for incrementally ISS systems with application to GRU networks
Sep 28, 2023This brief addresses the design of a Nonlinear Model Predictive Control (NMPC) strategy for exponentially incremental Input-to-State Stable (ISS) systems. In particular, a novel formulation is devised, which does not necessitate the onerous computation of terminal ingredients, but rather relies on the explicit definition of a minimum prediction horizon ensuring closed-loop stability. The designed methodology is particularly suited for the control of systems learned by Recurrent Neural Networks (RNNs), which are known for their enhanced modeling capabilities and for which the incremental ISS properties can be studied thanks to simple algebraic conditions. The approach is applied to Gated Recurrent Unit (GRU) networks, providing also a method for the design of a tailored state observer with convergence guarantees. The resulting control architecture is tested on a benchmark system, demonstrating its good control performances and efficient applicability.
Deep Long-Short Term Memory networks: Stability properties and Experimental validation
Apr 06, 2023The aim of this work is to investigate the use of Incrementally Input-to-State Stable ($\delta$ISS) deep Long Short Term Memory networks (LSTMs) for the identification of nonlinear dynamical systems. We show that suitable sufficient conditions on the weights of the network can be leveraged to setup a training procedure able to learn provenly-$\delta$ISS LSTM models from data. The proposed approach is tested on a real brake-by-wire apparatus to identify a model of the system from input-output experimentally collected data. Results show satisfactory modeling performances.
Towards lifelong learning of Recurrent Neural Networks for control design
Aug 08, 2022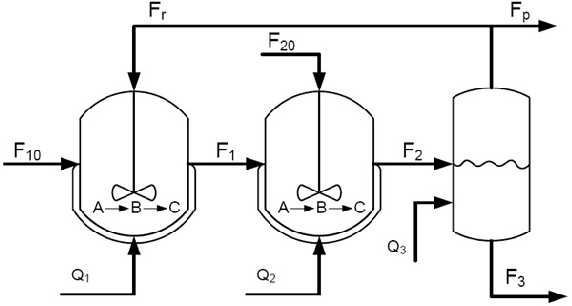

This paper proposes a method for lifelong learning of Recurrent Neural Networks, such as NNARX, ESN, LSTM, and GRU, to be used as plant models in control system synthesis. The problem is significant because in many practical applications it is required to adapt the model when new information is available and/or the system undergoes changes, without the need to store an increasing amount of data as time proceeds. Indeed, in this context, many problems arise, such as the well known Catastrophic Forgetting and Capacity Saturation ones. We propose an adaptation algorithm inspired by Moving Horizon Estimators, deriving conditions for its convergence. The described method is applied to a simulated chemical plant, already adopted as a challenging benchmark in the existing literature. The main results achieved are discussed.
* Copyright 2022 EUCA. This article appears in the Proceedings of the 2022 European Control Conference (ECC'22), July 12-15, 2022, London, pp. 2018-2023
An Offset-Free Nonlinear MPC scheme for systems learned by Neural NARX models
Mar 30, 2022
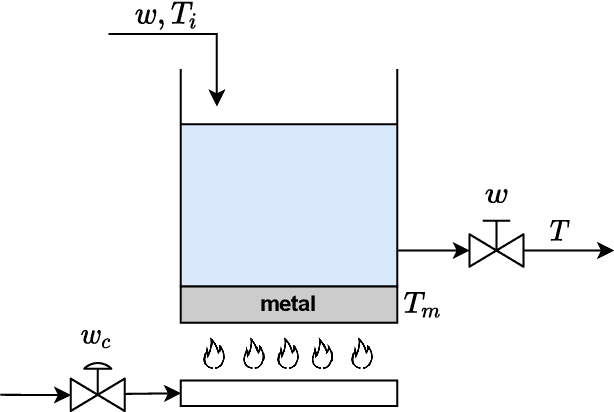

This paper deals with the design of nonlinear MPC controllers that provide offset-free setpoint tracking for models described by Neural Nonlinear AutoRegressive eXogenous (NNARX) networks. The NNARX model is identified from input-output data collected from the plant, and can be given a state-space representation with known measurable states made by past input and output variables, so that a state observer is not required. In the training phase, the Incremental Input-to-State Stability ({\delta}ISS) property can be forced when consistent with the behavior of the plant. The {\delta}ISS property is then leveraged to augment the model with an explicit integral action on the output tracking error, which allows to achieve offset-free tracking capabilities to the designed control scheme. The proposed control architecture is numerically tested on a water heating system and the achieved results are compared to those scored by another popular offset-free MPC method, showing that the proposed scheme attains remarkable performances even in presence of disturbances acting on the plant.
On Recurrent Neural Networks for learning-based control: recent results and ideas for future developments
Nov 26, 2021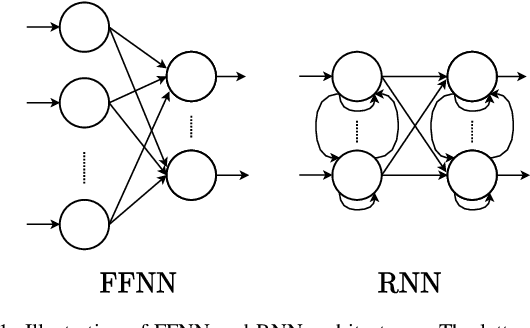
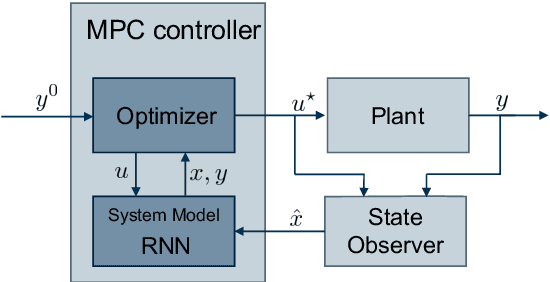

This paper aims to discuss and analyze the potentialities of Recurrent Neural Networks (RNN) in control design applications. The main families of RNN are considered, namely Neural Nonlinear AutoRegressive eXogenous, (NNARX), Echo State Networks (ESN), Long Short Term Memory (LSTM), and Gated Recurrent Units (GRU). The goal is twofold. Firstly, to survey recent results concerning the training of RNN that enjoy Input-to-State Stability (ISS) and Incremental Input-to-State Stability ({\delta}ISS) guarantees. Secondly, to discuss the issues that still hinder the widespread use of RNN for control, namely their robustness, verifiability, and interpretability. The former properties are related to the so-called generalization capabilities of the networks, i.e. their consistency with the underlying real plants, even in presence of unseen or perturbed input trajectories. The latter is instead related to the possibility of providing a clear formal connection between the RNN model and the plant. In this context, we illustrate how ISS and {\delta}ISS represent a significant step towards the robustness and verifiability of the RNN models, while the requirement of interpretability paves the way to the use of physics-based networks. The design of model predictive controllers with RNN as plant's model is also briefly discussed. Lastly, some of the main topics of the paper are illustrated on a simulated chemical system.
On the stability properties of Gated Recurrent Units neural networks
Nov 17, 2020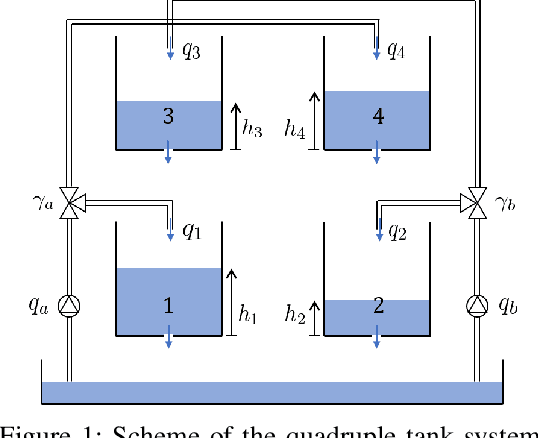


The goal of this paper is to provide sufficient conditions for guaranteeing the Input-to-State Stability (ISS) and the Incremental Input-to-State Stability ({\delta}ISS) of Gated Recurrent Units (GRUs) neural networks. These conditions, devised for both single-layer and multi-layer architectures, consist of nonlinear inequalities on network's weights. They can be employed to check the stability of trained networks, or can be enforced as constraints during the training procedure of a GRU. The resulting training procedure is tested on a Quadruple Tank nonlinear benchmark system, showing satisfactory modeling performances.
Nonlinear Model Predictive Control with Actuator Constraints for Multi-Rotor Aerial Vehicles
Nov 19, 2019
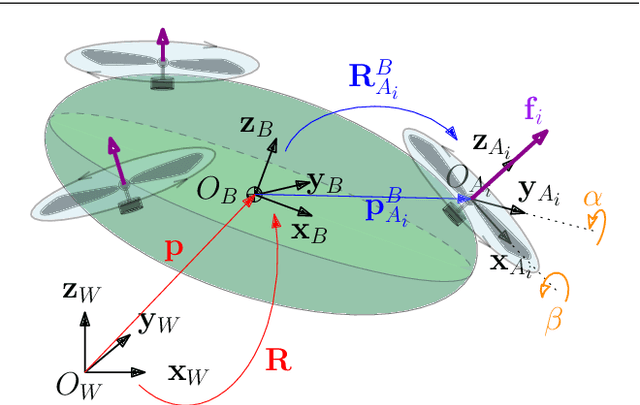
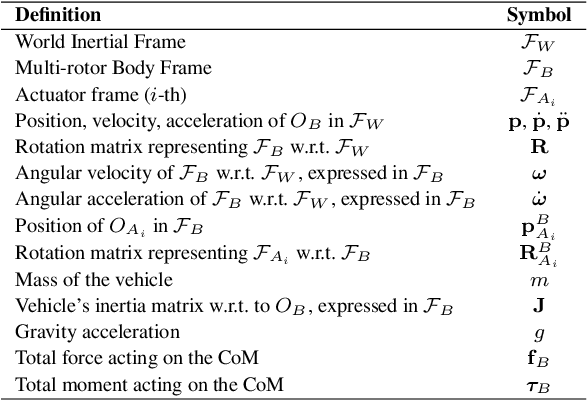
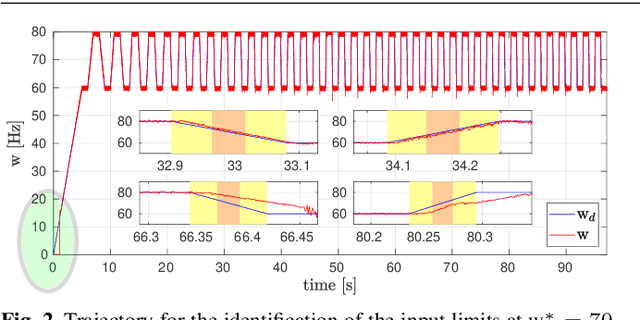
In this paper we propose, test, and validate an online Nonlinear Model Predictive Control (NMPC) method applied to multi-rotor aerial systems with arbitrarily positioned and oriented rotors. This work brings into question some common modeling and control design choices that are typically adopted in order to guarantee robustness and reliability but which may severely limit the attainable performance. In particular the proposed method \emph{does not} resort to common simplifications such as: 1) linear model approximation, 2) cascaded control paradigm used to decouple the translational and the rotational dynamics of the rigid body, and 3) use of low level reactive trackers for stabilization, 4) unconstrained system or use of fictitious constraints. The method addresses simultaneously the problem of local reference trajectory planning and that of stabilizing the vehicle dynamics. Furthermore, by considering as control inputs the derivatives of the forces generated by the multi-rotor vehicle and by means of a novel actuator modeling approach, the method avoids conservative -- and often fictitious -- input/state saturations which are present, e.g., in cascaded approaches. The control algorithm is implemented using a state-of-the-art Real Time Iteration (RTI) scheme with partial sensitivity update method. The performances of the control system are finally validated by means of real-time simulations and in real experiments, with a large spectrum of multi-rotor systems: an \emph{under-actuated} quadrotor, a \emph{fully actuated} hexarotor, a multi-rotor with \emph{orientable} propellers, and a multi-rotor with an unexpected \emph{rotor failure}.