 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Offset-Free Nonlinear MPC scheme for systems learned by Neural NARX models
Paper and Code
Mar 30, 2022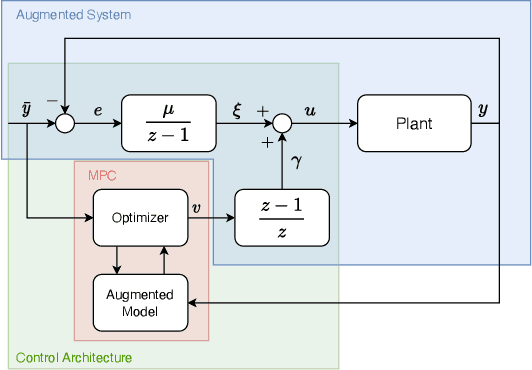
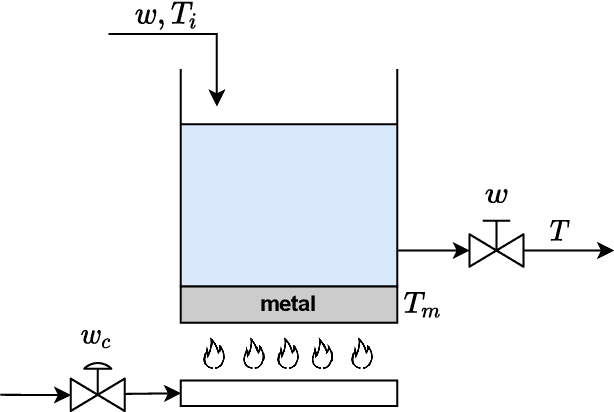

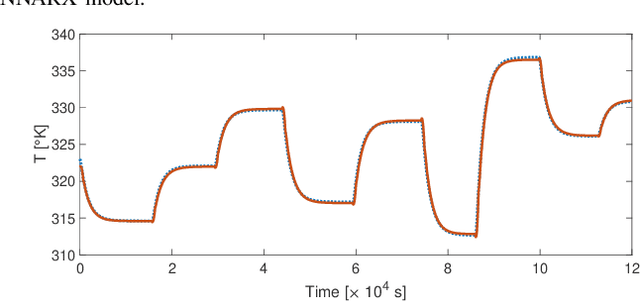
This paper deals with the design of nonlinear MPC controllers that provide offset-free setpoint tracking for models described by Neural Nonlinear AutoRegressive eXogenous (NNARX) networks. The NNARX model is identified from input-output data collected from the plant, and can be given a state-space representation with known measurable states made by past input and output variables, so that a state observer is not required. In the training phase, the Incremental Input-to-State Stability ({\delta}ISS) property can be forced when consistent with the behavior of the plant. The {\delta}ISS property is then leveraged to augment the model with an explicit integral action on the output tracking error, which allows to achieve offset-free tracking capabilities to the designed control scheme. The proposed control architecture is numerically tested on a water heating system and the achieved results are compared to those scored by another popular offset-free MPC method, showing that the proposed scheme attains remarkable performances even in presence of disturbances acting on the plant.