 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn Recurrent Neural Networks for learning-based control: recent results and ideas for future developments
Paper and Code
Nov 26, 2021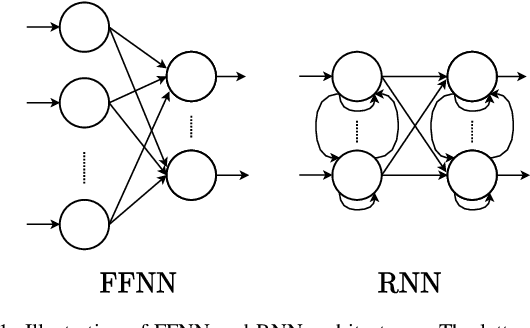
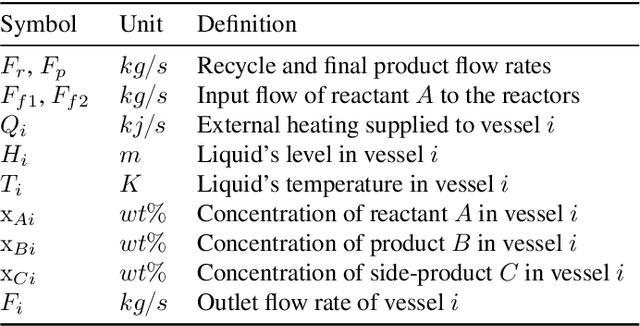
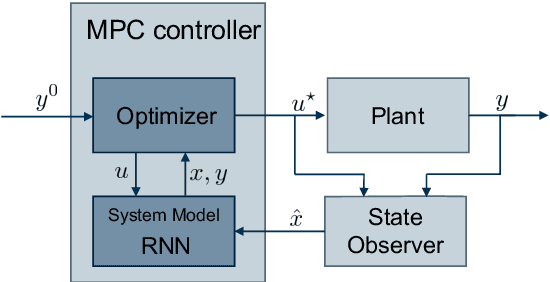

This paper aims to discuss and analyze the potentialities of Recurrent Neural Networks (RNN) in control design applications. The main families of RNN are considered, namely Neural Nonlinear AutoRegressive eXogenous, (NNARX), Echo State Networks (ESN), Long Short Term Memory (LSTM), and Gated Recurrent Units (GRU). The goal is twofold. Firstly, to survey recent results concerning the training of RNN that enjoy Input-to-State Stability (ISS) and Incremental Input-to-State Stability ({\delta}ISS) guarantees. Secondly, to discuss the issues that still hinder the widespread use of RNN for control, namely their robustness, verifiability, and interpretability. The former properties are related to the so-called generalization capabilities of the networks, i.e. their consistency with the underlying real plants, even in presence of unseen or perturbed input trajectories. The latter is instead related to the possibility of providing a clear formal connection between the RNN model and the plant. In this context, we illustrate how ISS and {\delta}ISS represent a significant step towards the robustness and verifiability of the RNN models, while the requirement of interpretability paves the way to the use of physics-based networks. The design of model predictive controllers with RNN as plant's model is also briefly discussed. Lastly, some of the main topics of the paper are illustrated on a simulated chemical system.