 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTowards lifelong learning of Recurrent Neural Networks for control design
Paper and Code
Aug 08, 2022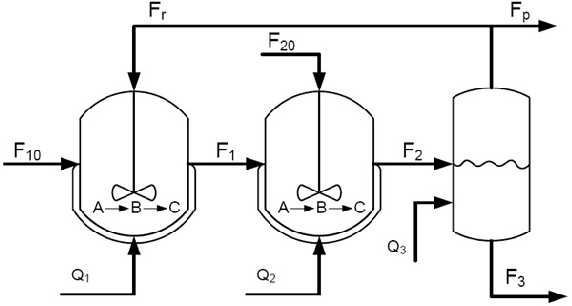
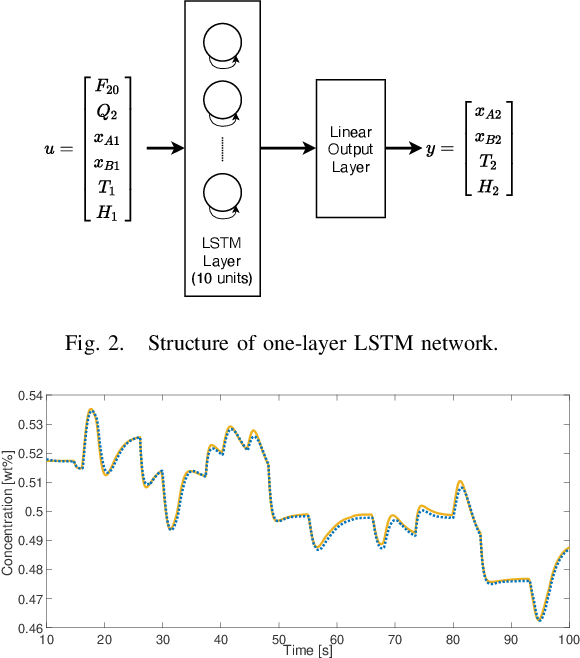

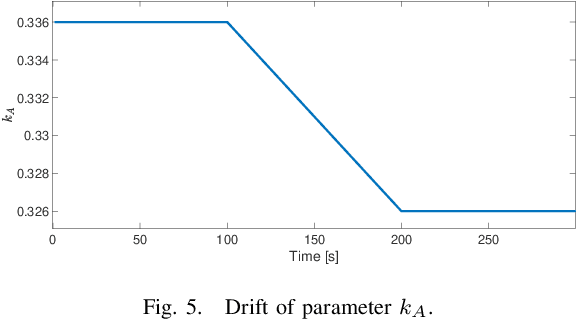
This paper proposes a method for lifelong learning of Recurrent Neural Networks, such as NNARX, ESN, LSTM, and GRU, to be used as plant models in control system synthesis. The problem is significant because in many practical applications it is required to adapt the model when new information is available and/or the system undergoes changes, without the need to store an increasing amount of data as time proceeds. Indeed, in this context, many problems arise, such as the well known Catastrophic Forgetting and Capacity Saturation ones. We propose an adaptation algorithm inspired by Moving Horizon Estimators, deriving conditions for its convergence. The described method is applied to a simulated chemical plant, already adopted as a challenging benchmark in the existing literature. The main results achieved are discussed.