 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Reward Functions from Diverse Sources of Human Feedback: Optimally Integrating Demonstrations and Preferences
Jun 24, 2020

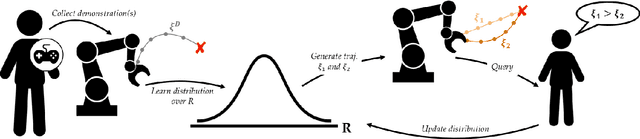

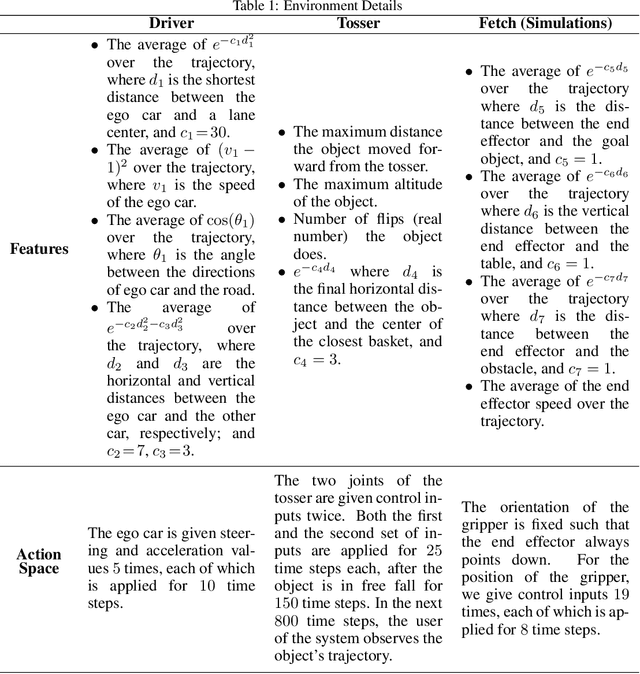
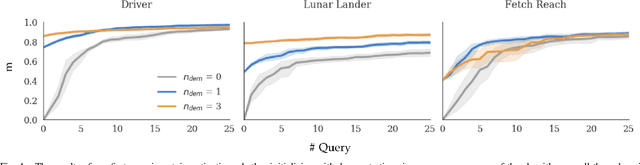
Reward functions are a common way to specify the objective of a robot. As designing reward functions can be extremely challenging, a more promising approach is to directly learn reward functions from human teachers. Importantly, humans provide data in a variety of forms: these include instructions (e.g., natural language), demonstrations, (e.g., kinesthetic guidance), and preferences (e.g., comparative rankings). Prior research has independently applied reward learning to each of these different data sources. However, there exist many domains where some of these information sources are not applicable or inefficient -- while multiple sources are complementary and expressive. Motivated by this general problem, we present a framework to integrate multiple sources of information, which are either passively or actively collected from human users. In particular, we present an algorithm that first utilizes user demonstrations to initialize a belief about the reward function, and then proactively probes the user with preference queries to zero-in on their true reward. This algorithm not only enables us combine multiple data sources, but it also informs the robot when it should leverage each type of information. Further, our approach accounts for the human's ability to provide data: yielding user-friendly preference queries which are also theoretically optimal. Our extensive simulated experiments and user studies on a Fetch mobile manipulator demonstrate the superiority and the usability of our integrated framework.
Asking Easy Questions: A User-Friendly Approach to Active Reward Learning
Oct 10, 2019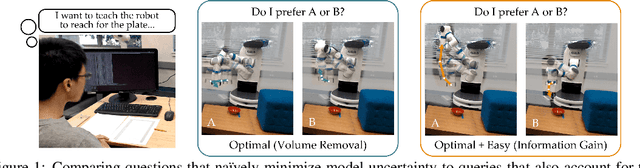

Robots can learn the right reward function by querying a human expert. Existing approaches attempt to choose questions where the robot is most uncertain about the human's response; however, they do not consider how easy it will be for the human to answer! In this paper we explore an information gain formulation for optimally selecting questions that naturally account for the human's ability to answer. Our approach identifies questions that optimize the trade-off between robot and human uncertainty, and determines when these questions become redundant or costly. Simulations and a user study show our method not only produces easy questions, but also ultimately results in faster reward learning.
Learning Reward Functions by Integrating Human Demonstrations and Preferences
Jun 21, 2019


Our goal is to accurately and efficiently learn reward functions for autonomous robots. Current approaches to this problem include inverse reinforcement learning (IRL), which uses expert demonstrations, and preference-based learning, which iteratively queries the user for her preferences between trajectories. In robotics however, IRL often struggles because it is difficult to get high-quality demonstrations; conversely, preference-based learning is very inefficient since it attempts to learn a continuous, high-dimensional function from binary feedback. We propose a new framework for reward learning, DemPref, that uses both demonstrations and preference queries to learn a reward function. Specifically, we (1) use the demonstrations to learn a coarse prior over the space of reward functions, to reduce the effective size of the space from which queries are generated; and (2) use the demonstrations to ground the (active) query generation process, to improve the quality of the generated queries. Our method alleviates the efficiency issues faced by standard preference-based learning methods and does not exclusively depend on (possibly low-quality) demonstrations. In numerical experiments, we find that DemPref is significantly more efficient than a standard active preference-based learning method. In a user study, we compare our method to a standard IRL method; we find that users rated the robot trained with DemPref as being more successful at learning their desired behavior, and preferred to use the DemPref system (over IRL) to train the robot.