 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeCan I Trust You? A User Study of Robot Mediation of a Support Group
Feb 11, 2020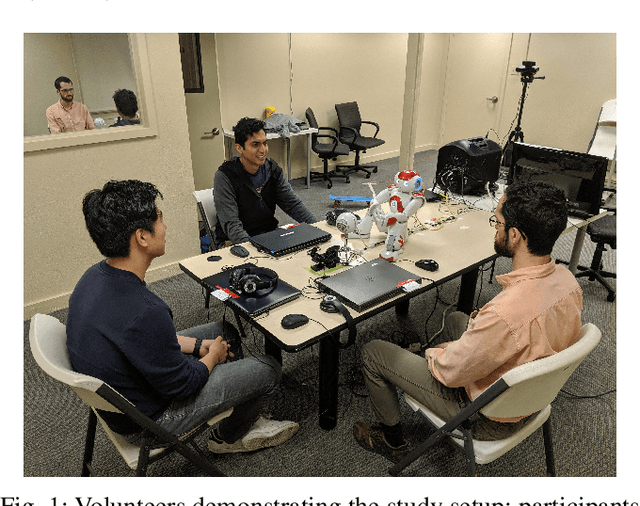
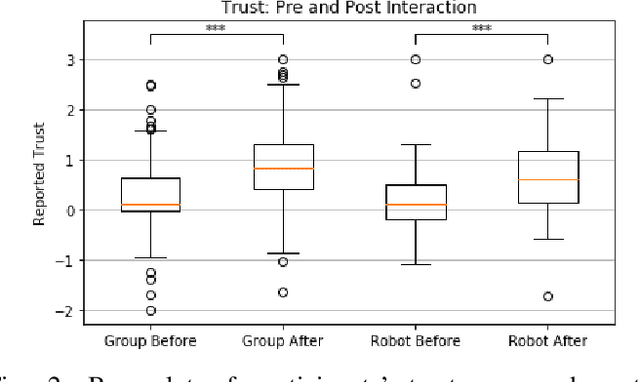
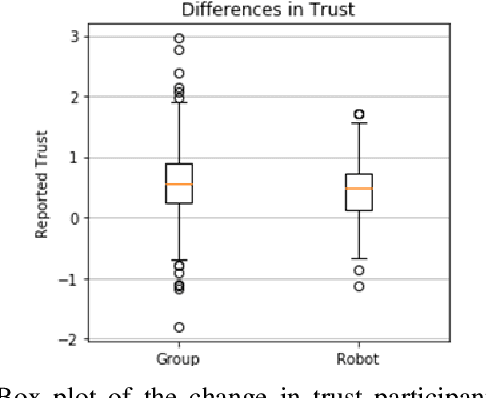

Socially assistive robots have the potential to improve group dynamics when interacting with groups of people in social settings. This work contributes to the understanding of those dynamics through a user study of trust dynamics in the novel context of a robot mediated support group. For this study, a novel framework for robot mediation of a support group was developed and validated. To evaluate interpersonal trust in the multi-party setting, a dyadic trust scale was implemented and found to be uni-factorial, validating it as an appropriate measure of general trust. The results of this study demonstrate a significant increase in average interpersonal trust after the group interaction session, and qualitative post-session interview data report that participants found the interaction helpful and successfully supported and learned from one other. The results of the study validate that a robot-mediated support group can improve trust among strangers and allow them to share and receive support for their academic stress.
Designing a Socially Assistive Robot for Long-Term In-Home Use for Children with Autism Spectrum Disorders
Jan 22, 2020
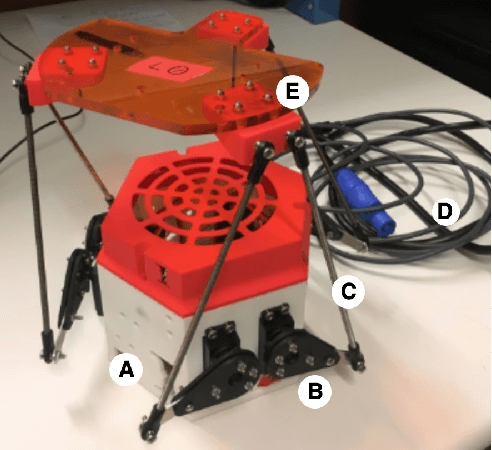

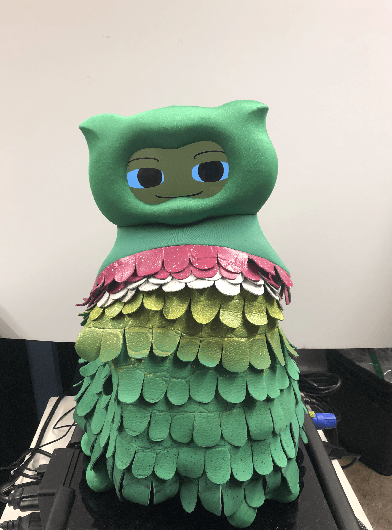
Socially assistive robotics (SAR) research has shown great potential for supplementing and augmenting therapy for children with autism spectrum disorders (ASD). However, the vast majority of SAR research has been limited to short-term studies in highly controlled environments. The design and development of a SAR system capable of interacting autonomously {\it in situ} for long periods of time involves many engineering and computing challenges. This paper presents the design of a fully autonomous SAR system for long-term, in-home use with children with ASD. We address design decisions based on robustness and adaptability needs, discuss the development of the robot's character and interactions, and provide insights from the month-long, in-home data collections with children with ASD. This work contributes to a larger research program that is exploring how SAR can be used for enhancing the social and cognitive development of children with ASD.
Analysis of Dynamic Task Allocation in Multi-Robot Systems
Apr 27, 2006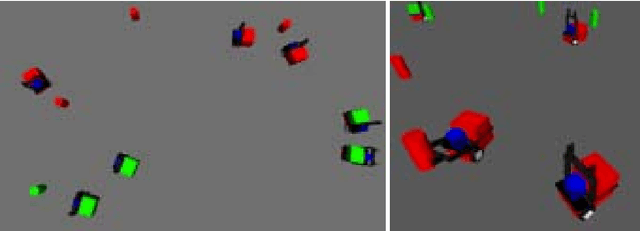

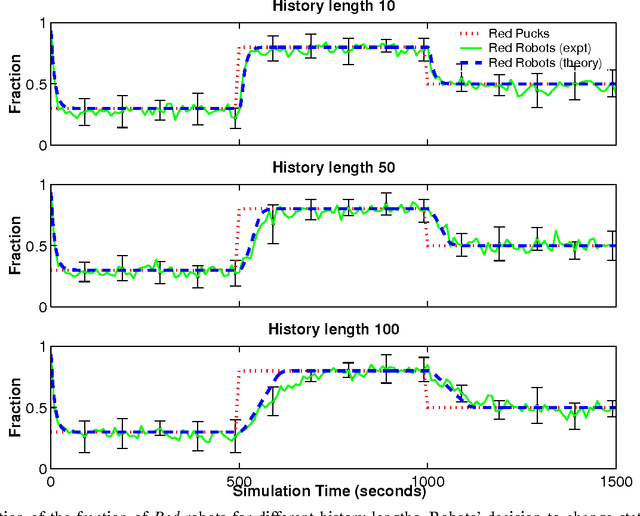
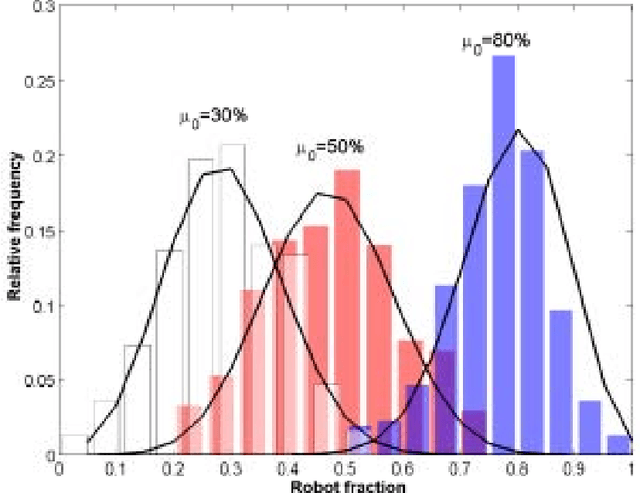
Dynamic task allocation is an essential requirement for multi-robot systems operating in unknown dynamic environments. It allows robots to change their behavior in response to environmental changes or actions of other robots in order to improve overall system performance. Emergent coordination algorithms for task allocation that use only local sensing and no direct communication between robots are attractive because they are robust and scalable. However, a lack of formal analysis tools makes emergent coordination algorithms difficult to design. In this paper we present a mathematical model of a general dynamic task allocation mechanism. Robots using this mechanism have to choose between two types of task, and the goal is to achieve a desired task division in the absence of explicit communication and global knowledge. Robots estimate the state of the environment from repeated local observations and decide which task to choose based on these observations. We model the robots and observations as stochastic processes and study the dynamics of the collective behavior. Specifically, we analyze the effect that the number of observations and the choice of the decision function have on the performance of the system. The mathematical models are validated in a multi-robot multi-foraging scenario. The model's predictions agree very closely with experimental results from sensor-based simulations.