 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDesigning a Socially Assistive Robot for Long-Term In-Home Use for Children with Autism Spectrum Disorders
Jan 22, 2020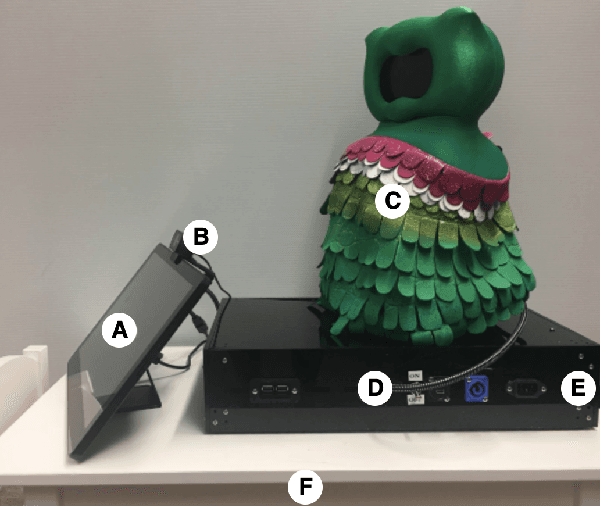
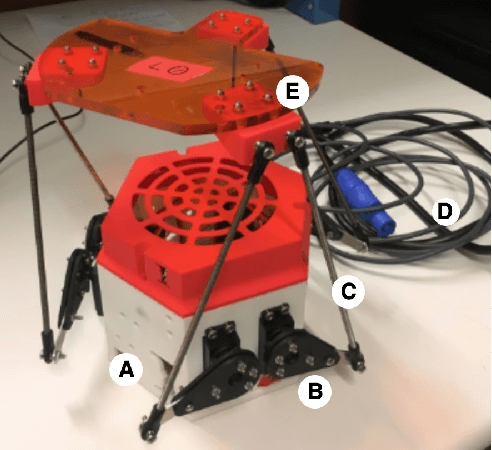

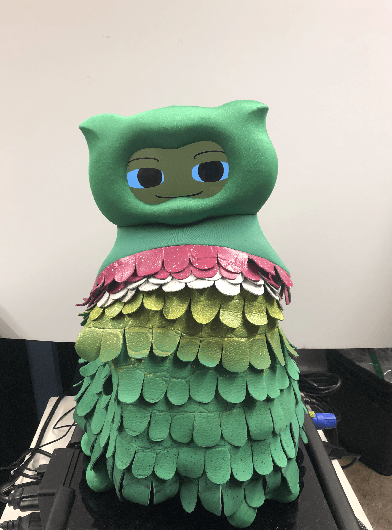
Socially assistive robotics (SAR) research has shown great potential for supplementing and augmenting therapy for children with autism spectrum disorders (ASD). However, the vast majority of SAR research has been limited to short-term studies in highly controlled environments. The design and development of a SAR system capable of interacting autonomously {\it in situ} for long periods of time involves many engineering and computing challenges. This paper presents the design of a fully autonomous SAR system for long-term, in-home use with children with ASD. We address design decisions based on robustness and adaptability needs, discuss the development of the robot's character and interactions, and provide insights from the month-long, in-home data collections with children with ASD. This work contributes to a larger research program that is exploring how SAR can be used for enhancing the social and cognitive development of children with ASD.
Using Socially Expressive Mixed Reality Arms for Enhancing Low-Expressivity Robots
Nov 30, 2019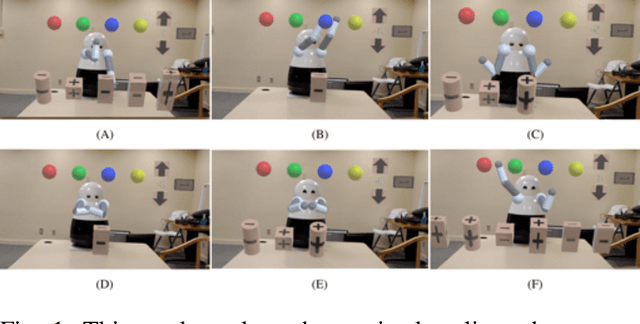

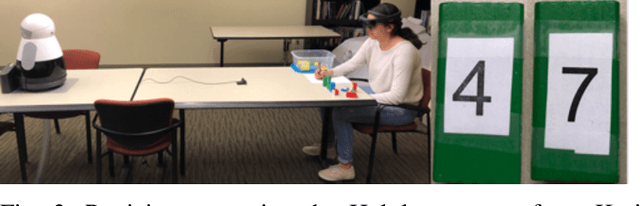
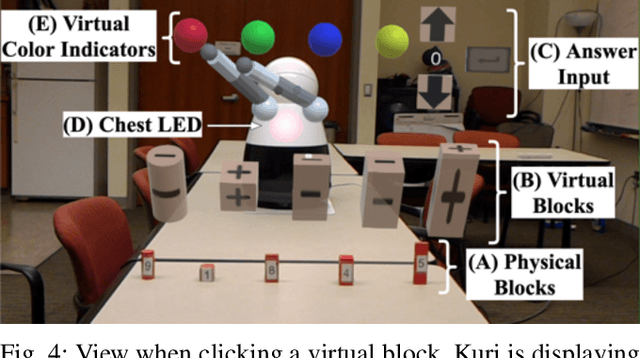
Expressivity--the use of multiple modalities to convey internal state and intent of a robot--is critical for interaction. Yet, due to cost, safety, and other constraints, many robots lack high degrees of physical expressivity. This paper explores using mixed reality to enhance a robot with limited expressivity by adding virtual arms that extend the robot's expressiveness. The arms, capable of a range of non-physically-constrained gestures, were evaluated in a between-subject study ($n=34$) where participants engaged in a mixed reality mathematics task with a socially assistive robot. The study results indicate that the virtual arms added a higher degree of perceived emotion, helpfulness, and physical presence to the robot. Users who reported a higher perceived physical presence also found the robot to have a higher degree of social presence, ease of use, usefulness, and had a positive attitude toward using the robot with mixed reality. The results also demonstrate the users' ability to distinguish the virtual gestures' valence and intent.
Long-Term Personalization of an In-Home Socially Assistive Robot for Children With Autism Spectrum Disorders
Nov 18, 2019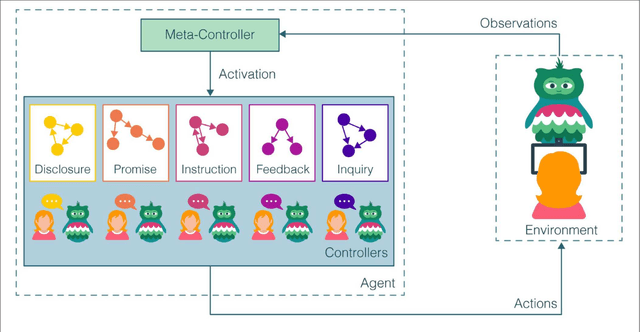
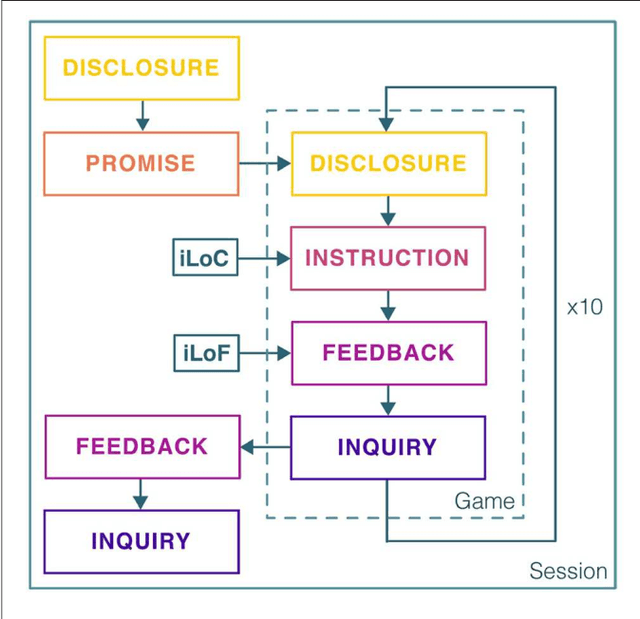
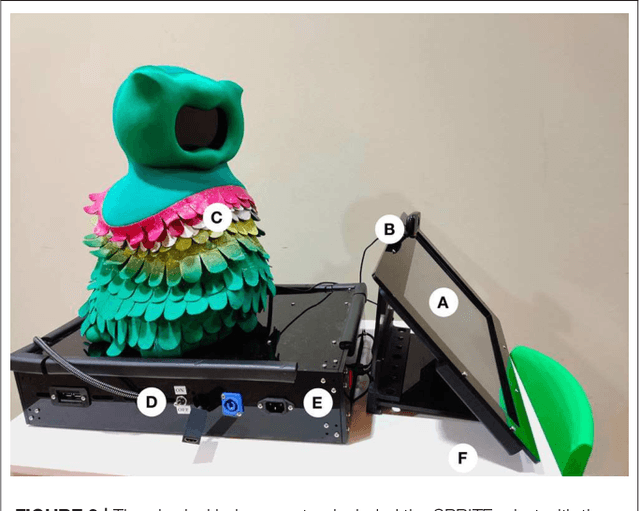
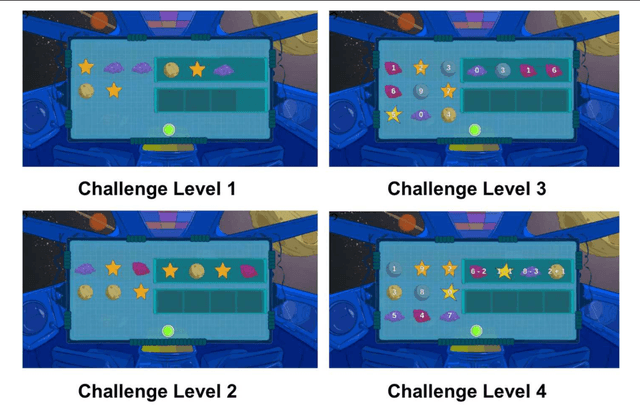
Socially assistive robots (SAR) have shown great potential to augment the social and educational development of children with autism spectrum disorders (ASD). As SAR continues to substantiate itself as an effective enhancement to human intervention, researchers have sought to study its longitudinal impacts in real-world environments, including the home. Computational personalization stands out as a central computational challenge as it is necessary to enable SAR systems to adapt to each child's unique and changing needs. Toward that end, we formalized personalization as a hierarchical human robot learning framework (hHRL) consisting of five controllers (disclosure, promise, instruction, feedback, and inquiry) mediated by a meta-controller that utilized reinforcement learning to personalize instruction challenge levels and robot feedback based on each user's unique learning patterns. We instantiated and evaluated the approach in a study with 17 children with ASD, aged 3 to 7 years old, over month-long interventions in their homes. Our findings demonstrate that the fully autonomous SAR system was able to personalize its instruction and feedback over time to each child's proficiency. As a result, every child participant showed improvements in targeted skills and long-term retention of intervention content. Moreover, all child users were engaged for a majority of the intervention, and their families reported the SAR system to be useful and adaptable. In summary, our results show that autonomous, personalized SAR interventions are both feasible and effective in providing long-term in-home developmental support for children with diverse learning needs.
* 30 pages, 10 figures, Frontiers in Robotics and AI journal