 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStretchBot: A Neuro-Symbolic Framework for Adaptive Guidance with Assistive Robots
Apr 01, 2026Assistive robots have growing potential to support physical wellbeing in home and healthcare settings, for example, by guiding users through stretching or rehabilitation routines. However, existing systems remain largely scripted, which limits their ability to adapt to user state, environmental context, and interaction dynamics. In this work, we present StretchBot, a hybrid neuro-symbolic robotic coach for adaptive assistive guidance. The system combines multimodal perception with knowledge-graph-grounded large language model reasoning to support context-aware adjustments during short stretching sessions while maintaining a structured routine. To complement the system description, we report an exploratory pilot comparison between scripted and adaptive guidance with three participants. The pilot findings suggest that the adaptive condition improved perceived adaptability and contextual relevance, while scripted guidance remained competitive in smoothness and predictability. These results provide preliminary evidence that structured actionable knowledge can help ground language-model-based adaptation in embodied assistive interaction, while also highlighting the need for larger, longitudinal studies to evaluate robustness, generalizability, and long-term user experience.
"Only ChatGPT gets me": An Empirical Analysis of GPT versus other Large Language Models for Emotion Detection in Text
Mar 05, 2025This work investigates the capabilities of large language models (LLMs) in detecting and understanding human emotions through text. Drawing upon emotion models from psychology, we adopt an interdisciplinary perspective that integrates computational and affective sciences insights. The main goal is to assess how accurately they can identify emotions expressed in textual interactions and compare different models on this specific task. This research contributes to broader efforts to enhance human-computer interaction, making artificial intelligence technologies more responsive and sensitive to users' emotional nuances. By employing a methodology that involves comparisons with a state-of-the-art model on the GoEmotions dataset, we aim to gauge LLMs' effectiveness as a system for emotional analysis, paving the way for potential applications in various fields that require a nuanced understanding of human language.
Utility Functions for Human/Robot Interaction
Apr 08, 2022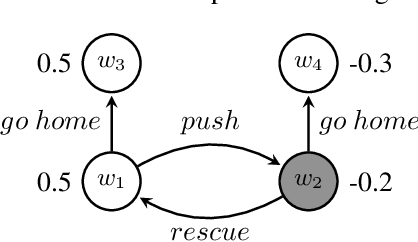
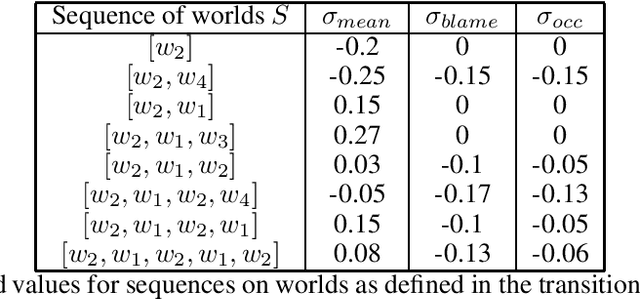
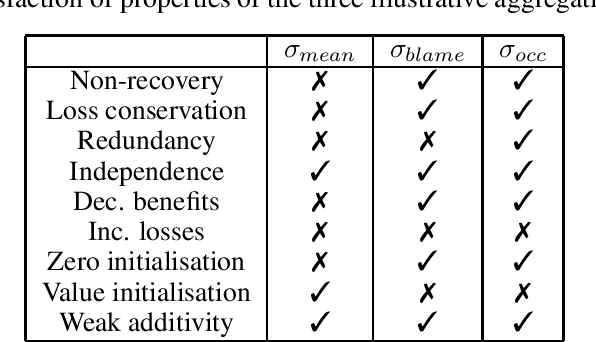
In this paper, we place ourselves in the context of human robot interaction and address the problem of cognitive robot modelling. More precisely we are investigating properties of a utility-based model that will govern a robot's actions. The novelty of this approach lies in embedding the responsibility of the robot over the state of affairs into the utility model via a utility aggregation function. We describe desiderata for such a function and consider related properties.
Trust-based Multiagent Consensus or Weightings Aggregation
Apr 06, 2020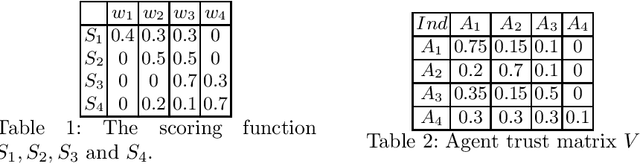
We introduce a framework for reaching a consensus amongst several agents communicating via a trust network on conflicting information about their environment. We formalise our approach and provide an empirical and theoretical analysis of its properties.
Distance-Based Approaches to Repair Semantics in Ontology-based Data Access
Oct 01, 2019
In the presence of inconsistencies, repair techniques thrive to restore consistency by reasoning with several repairs. However, since the number of repairs can be large, standard inconsistent tolerant semantics usually yield few answers. In this paper, we use the notion of syntactic distance between repairs following the intuition that it can allow us to cluster some repairs "close" to each other. In this way, we propose a generic framework to answer queries in a more personalise fashion.
A General Modifier-based Framework for Inconsistency-Tolerant Query Answering
Feb 18, 2016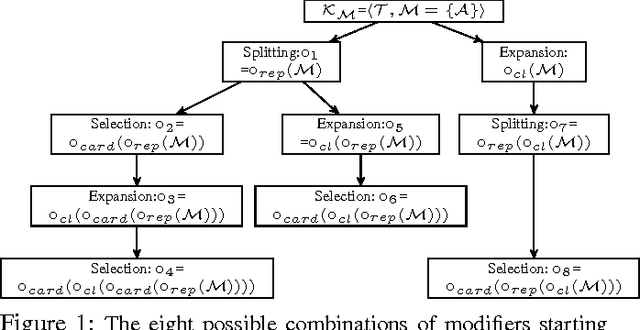
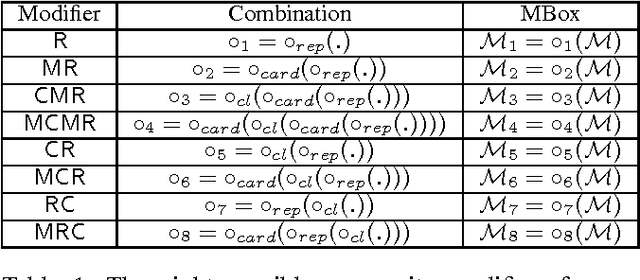
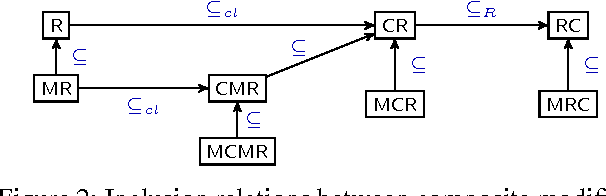
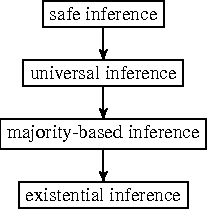
We propose a general framework for inconsistency-tolerant query answering within existential rule setting. This framework unifies the main semantics proposed by the state of art and introduces new ones based on cardinality and majority principles. It relies on two key notions: modifiers and inference strategies. An inconsistency-tolerant semantics is seen as a composite modifier plus an inference strategy. We compare the obtained semantics from a productivity point of view.