 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDigital Twin Generation from Visual Data: A Survey
Apr 17, 2025This survey explores recent developments in generating digital twins from videos. Such digital twins can be used for robotics application, media content creation, or design and construction works. We analyze various approaches, including 3D Gaussian Splatting, generative in-painting, semantic segmentation, and foundation models highlighting their advantages and limitations. Additionally, we discuss challenges such as occlusions, lighting variations, and scalability, as well as potential future research directions. This survey aims to provide a comprehensive overview of state-of-the-art methodologies and their implications for real-world applications. Awesome list: https://github.com/ndrwmlnk/awesome-digital-twins
The utilization of spherical camera in simulation for service robotics
Apr 01, 2021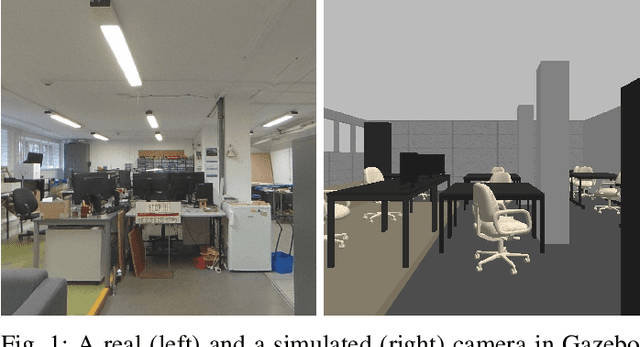

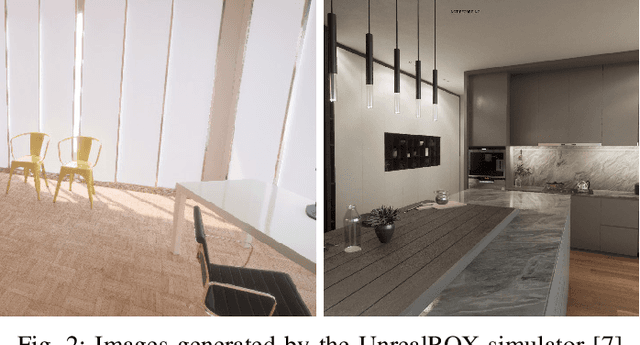
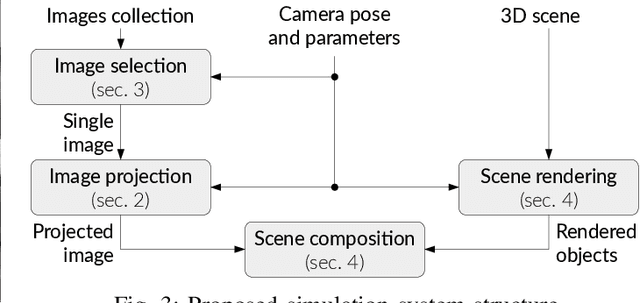
Safety is one of the most critical factors in robotics, especially when robots have to collaborate with people in a~shared environment. Testing the physical systems, however, must focus on much more than just software. One of the common steps in robotic system development is the utilization of simulators, which are very good for tasks like navigation or manipulation. Testing vision systems is more challenging, as the simulated data often is far from the real camera readings. In this paper, we show the advantages of using the spherical camera for recording the sequences of test images and a~way to integrate those with existing robotic simulator. The presented system also has the possibility to be extended with rendered objects to further improve its usability.
Active fall prevention: robotic vision in AAL
Apr 01, 2021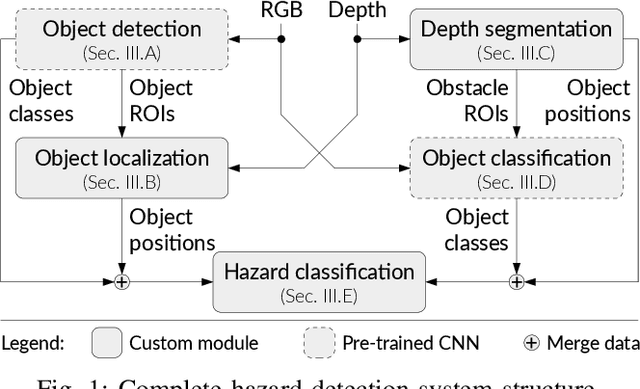

Effective methods of preventing falls significantly improve the quality of life of the Elderly. Nowadays, people focus mainly on the proper provision of the apartment with handrails and fall detection systems once they have occurred. The article presents a~system of active detection and classification of the risk of falls in the home space using a~service robot equipped with a~vision sensor. Hazard classification allows for effective performance of tasks assigned to the robot while maintaining a~high level of user safety.
An intent-based approach for creating assistive robots' control systems
May 25, 2020
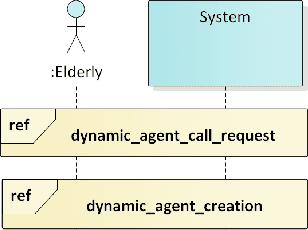
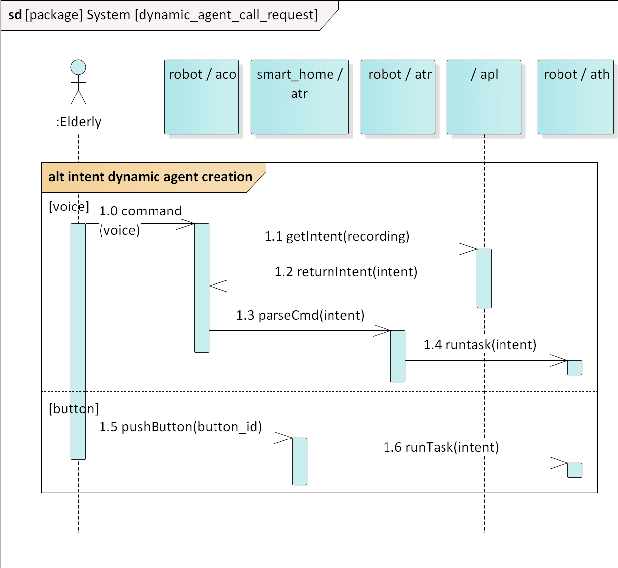
The current research standards in robotics demand general approaches to robots' controllers development. In the assistive robotics domain, the human-machine interaction plays a~substantial role. Especially, the humans generate intents that affect robot control system. In the article an approach is presented for creating control systems for assistive robots, which reacts to users' intents delivered by voice commands, buttons, or an operator console. The whole approach was applied to the real system consisting of customised \tiago{} robot and additional hardware components. The exemplary experiments performed on the platform illustrate the motivation for diversification of human-machine interfaces in assistive robots.