Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn intent-based approach for creating assistive robots' control systems
May 25, 2020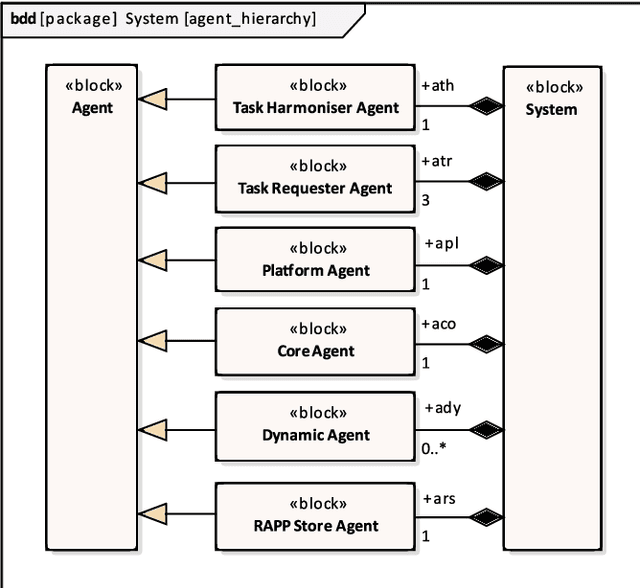
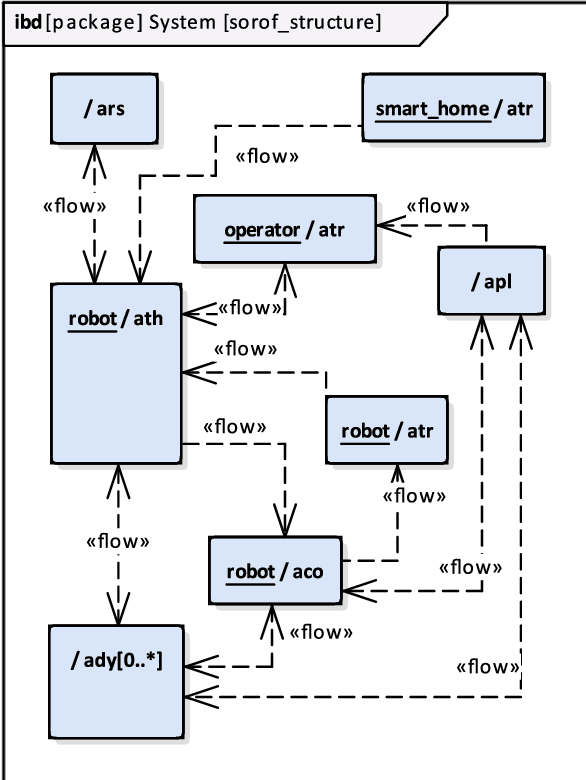
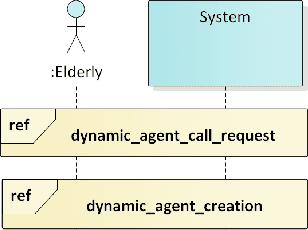
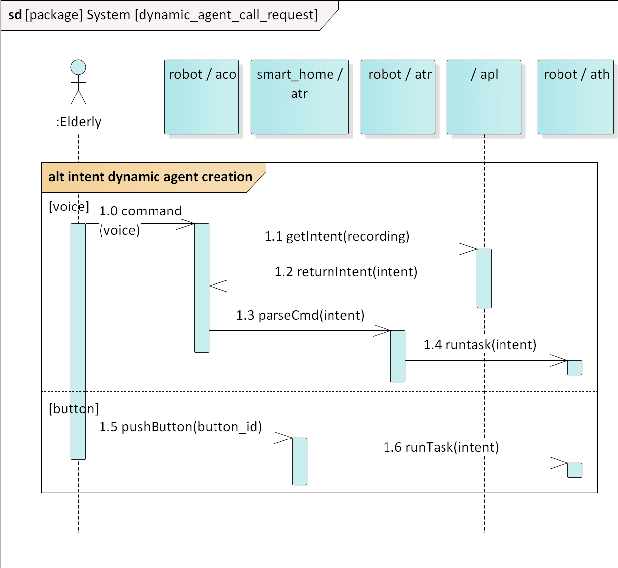
The current research standards in robotics demand general approaches to robots' controllers development. In the assistive robotics domain, the human-machine interaction plays a~substantial role. Especially, the humans generate intents that affect robot control system. In the article an approach is presented for creating control systems for assistive robots, which reacts to users' intents delivered by voice commands, buttons, or an operator console. The whole approach was applied to the real system consisting of customised \tiago{} robot and additional hardware components. The exemplary experiments performed on the platform illustrate the motivation for diversification of human-machine interfaces in assistive robots.
* 6 pages, 8figures, The work was initially submitted to the 25th
International Conference on Methods and Models in Automation and Robotics
(MMAR) that was cancelled due to COVID-2019
Via