 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Unified Framework for Mutual Improvement of SLAM and Semantic Segmentation
Dec 25, 2018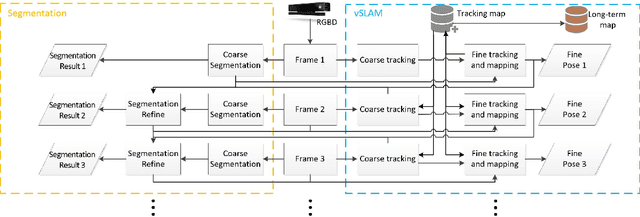
This paper presents a novel framework for simultaneously implementing localization and segmentation, which are two of the most important vision-based tasks for robotics. While the goals and techniques used for them were considered to be different previously, we show that by making use of the intermediate results of the two modules, their performance can be enhanced at the same time. Our framework is able to handle both the instantaneous motion and long-term changes of instances in localization with the help of the segmentation result, which also benefits from the refined 3D pose information. We conduct experiments on various datasets, and prove that our framework works effectively on improving the precision and robustness of the two tasks and outperforms existing localization and segmentation algorithms.