 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExelMap: Explainable Element-based HD-Map Change Detection and Update
Sep 16, 2024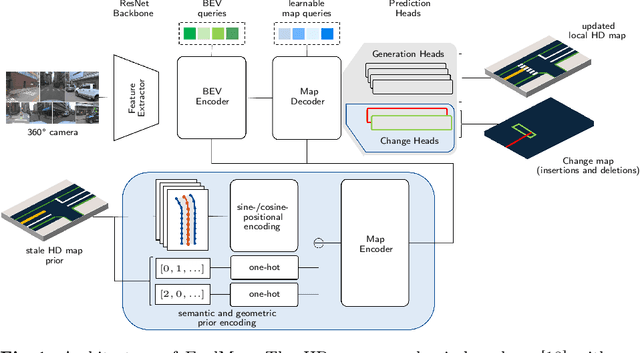
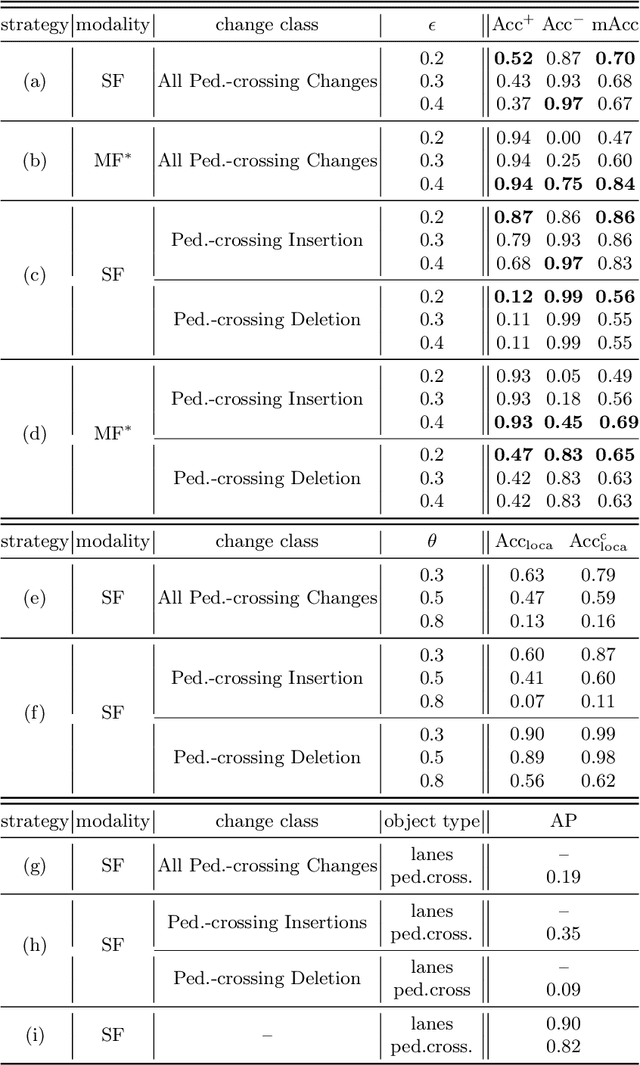
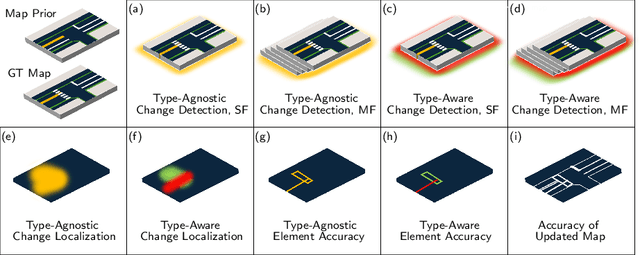
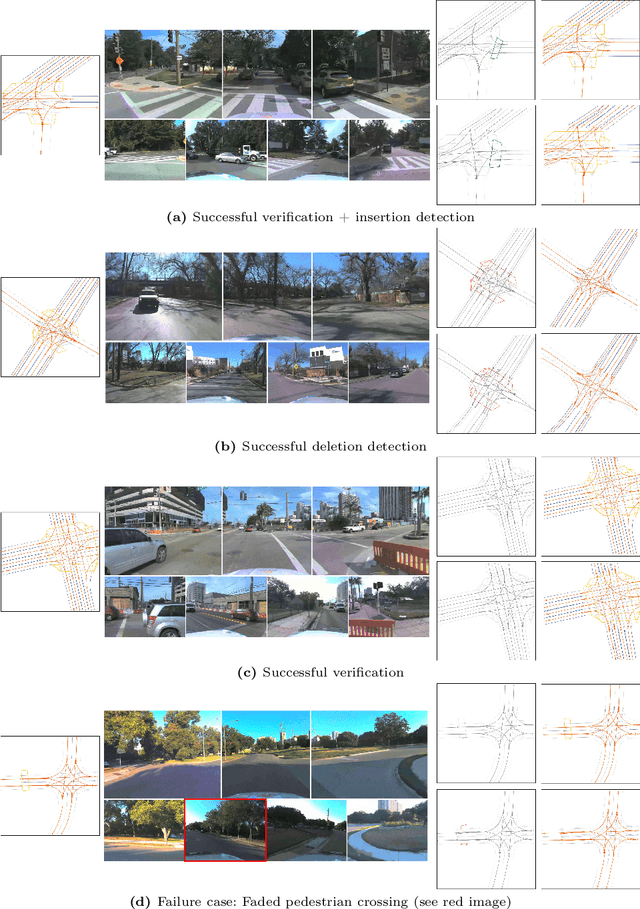
Acquisition and maintenance are central problems in deploying high-definition (HD) maps for autonomous driving, with two lines of research prevalent in current literature: Online HD map generation and HD map change detection. However, the generated map's quality is currently insufficient for safe deployment, and many change detection approaches fail to precisely localize and extract the changed map elements, hence lacking explainability and hindering a potential fleet-based cooperative HD map update. In this paper, we propose the novel task of explainable element-based HD map change detection and update. In extending recent approaches that use online mapping techniques informed with an outdated map prior for HD map updating, we present ExelMap, an explainable element-based map updating strategy that specifically identifies changed map elements. In this context, we discuss how currently used metrics fail to capture change detection performance, while allowing for unfair comparison between prior-less and prior-informed map generation methods. Finally, we present an experimental study on real-world changes related to pedestrian crossings of the Argoverse 2 Map Change Dataset. To the best of our knowledge, this is the first comprehensive problem investigation of real-world end-to-end element-based HD map change detection and update, and ExelMap the first proposed solution.
Beyond the Frontier: Predicting Unseen Walls from Occupancy Grids by Learning from Floor Plans
Jun 13, 2024



In this paper, we tackle the challenge of predicting the unseen walls of a partially observed environment as a set of 2D line segments, conditioned on occupancy grids integrated along the trajectory of a 360{\deg} LIDAR sensor. A dataset of such occupancy grids and their corresponding target wall segments is collected by navigating a virtual robot between a set of randomly sampled waypoints in a collection of office-scale floor plans from a university campus. The line segment prediction task is formulated as an autoregressive sequence prediction task, and an attention-based deep network is trained on the dataset. The sequence-based autoregressive formulation is evaluated through predicted information gain, as in frontier-based autonomous exploration, demonstrating significant improvements over both non-predictive estimation and convolution-based image prediction found in the literature. Ablations on key components are evaluated, as well as sensor range and the occupancy grid's metric area. Finally, model generality is validated by predicting walls in a novel floor plan reconstructed on-the-fly in a real-world office environment.
* RA-L, 8 pages
FloorGenT: Generative Vector Graphic Model of Floor Plans for Robotics
Mar 07, 2022


Floor plans are the basis of reasoning in and communicating about indoor environments. In this paper, we show that by modelling floor plans as sequences of line segments seen from a particular point of view, recent advances in autoregressive sequence modelling can be leveraged to model and predict floor plans. The line segments are canonicalized and translated to sequence of tokens and an attention-based neural network is used to fit a one-step distribution over next tokens. We fit the network to sequences derived from a set of large-scale floor plans, and demonstrate the capabilities of the model in four scenarios: novel floor plan generation, completion of partially observed floor plans, generation of floor plans from simulated sensor data, and finally, the applicability of a floor plan model in predicting the shortest distance with partial knowledge of the environment.
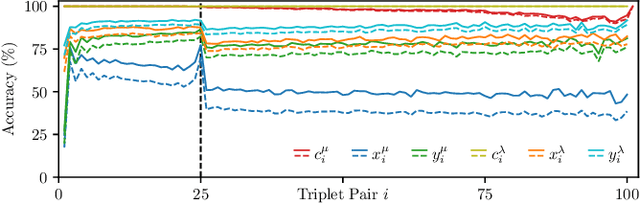
GCNv2: Efficient Correspondence Prediction for Real-Time SLAM
Mar 23, 2019
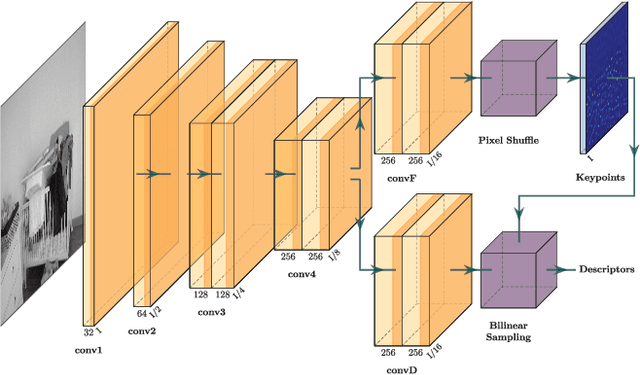

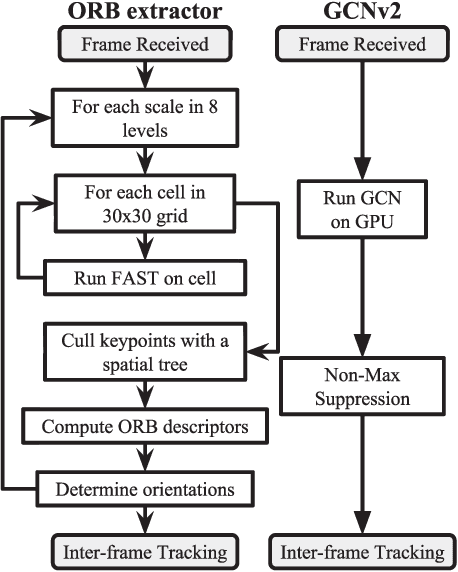
In this paper, we present a deep learning-based network, GCNv2, for generation of keypoints and descriptors. GCNv2 is built on our previous method, GCN, a network trained for 3D projective geometry. GCNv2 is designed with a binary descriptor vector as the ORB feature so that it can easily replace ORB in systems such as ORB-SLAM. GCNv2 significantly improves the computational efficiency over GCN that was only able to run on desktop hardware. We show how a modified version of ORB-SLAM using GCNv2 features runs on a Jetson TX2, an embdded low-power platform. Experimental results show that GCNv2 retains almost the same accuracy as GCN and that it is robust enough to use for control of a flying drone.
On the Performance of Network Parallel Training in Artificial Neural Networks
Jan 18, 2017
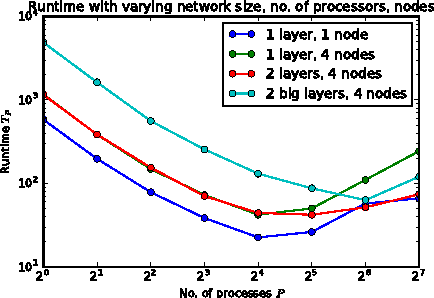

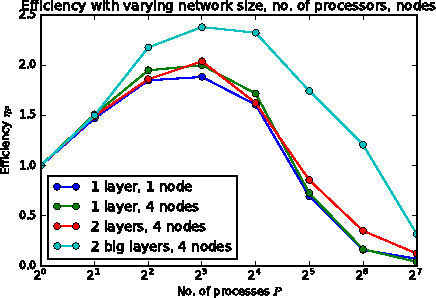
Artificial Neural Networks (ANNs) have received increasing attention in recent years with applications that span a wide range of disciplines including vital domains such as medicine, network security and autonomous transportation. However, neural network architectures are becoming increasingly complex and with an increasing need to obtain real-time results from such models, it has become pivotal to use parallelization as a mechanism for speeding up network training and deployment. In this work we propose an implementation of Network Parallel Training through Cannon's Algorithm for matrix multiplication. We show that increasing the number of processes speeds up training until the point where process communication costs become prohibitive; this point varies by network complexity. We also show through empirical efficiency calculations that the speedup obtained is superlinear.