 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeArgoTweak: Towards Self-Updating HD Maps through Structured Priors
Sep 10, 2025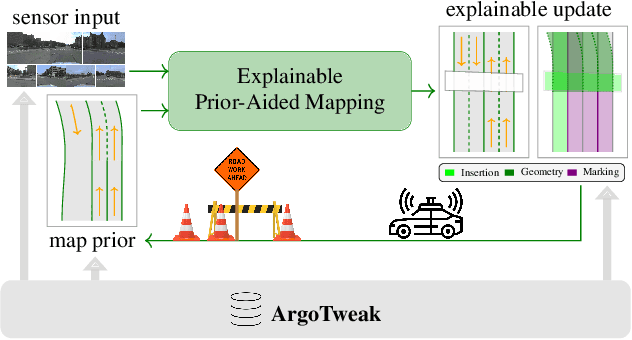
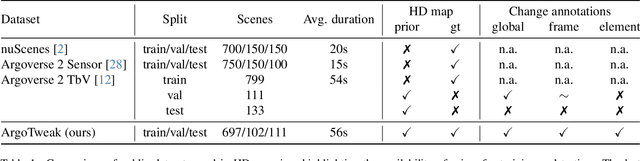
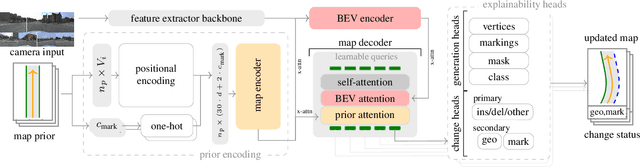
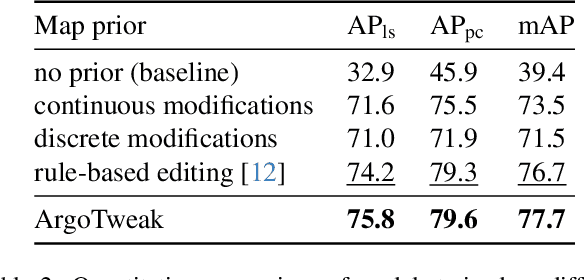
Reliable integration of prior information is crucial for self-verifying and self-updating HD maps. However, no public dataset includes the required triplet of prior maps, current maps, and sensor data. As a result, existing methods must rely on synthetic priors, which create inconsistencies and lead to a significant sim2real gap. To address this, we introduce ArgoTweak, the first dataset to complete the triplet with realistic map priors. At its core, ArgoTweak employs a bijective mapping framework, breaking down large-scale modifications into fine-grained atomic changes at the map element level, thus ensuring interpretability. This paradigm shift enables accurate change detection and integration while preserving unchanged elements with high fidelity. Experiments show that training models on ArgoTweak significantly reduces the sim2real gap compared to synthetic priors. Extensive ablations further highlight the impact of structured priors and detailed change annotations. By establishing a benchmark for explainable, prior-aided HD mapping, ArgoTweak advances scalable, self-improving mapping solutions. The dataset, baselines, map modification toolbox, and further resources are available at https://kth-rpl.github.io/ArgoTweak/.
ExelMap: Explainable Element-based HD-Map Change Detection and Update
Sep 16, 2024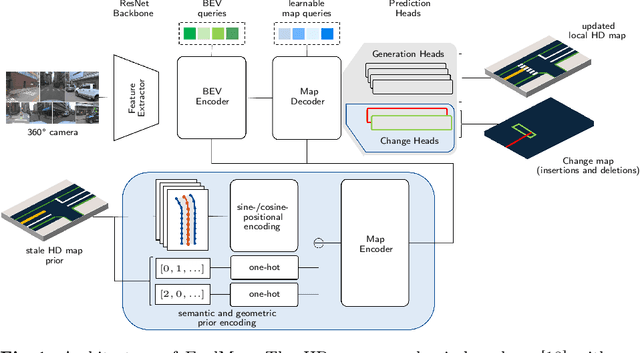
Acquisition and maintenance are central problems in deploying high-definition (HD) maps for autonomous driving, with two lines of research prevalent in current literature: Online HD map generation and HD map change detection. However, the generated map's quality is currently insufficient for safe deployment, and many change detection approaches fail to precisely localize and extract the changed map elements, hence lacking explainability and hindering a potential fleet-based cooperative HD map update. In this paper, we propose the novel task of explainable element-based HD map change detection and update. In extending recent approaches that use online mapping techniques informed with an outdated map prior for HD map updating, we present ExelMap, an explainable element-based map updating strategy that specifically identifies changed map elements. In this context, we discuss how currently used metrics fail to capture change detection performance, while allowing for unfair comparison between prior-less and prior-informed map generation methods. Finally, we present an experimental study on real-world changes related to pedestrian crossings of the Argoverse 2 Map Change Dataset. To the best of our knowledge, this is the first comprehensive problem investigation of real-world end-to-end element-based HD map change detection and update, and ExelMap the first proposed solution.