Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGCNv2: Efficient Correspondence Prediction for Real-Time SLAM
Paper and Code

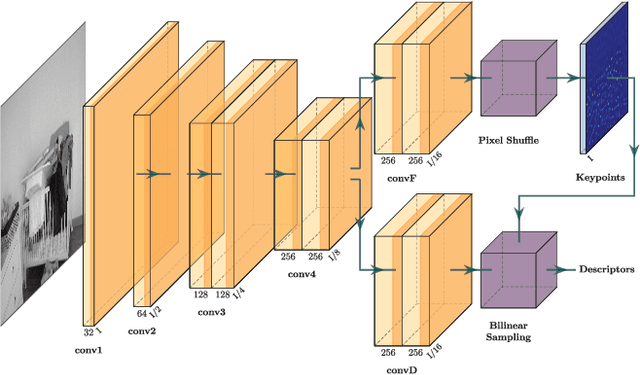

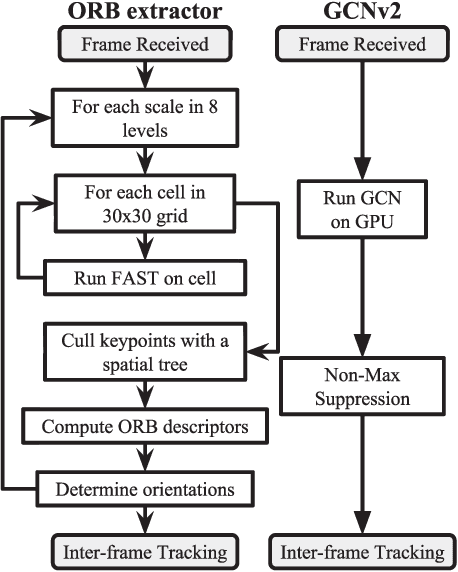
In this paper, we present a deep learning-based network, GCNv2, for generation of keypoints and descriptors. GCNv2 is built on our previous method, GCN, a network trained for 3D projective geometry. GCNv2 is designed with a binary descriptor vector as the ORB feature so that it can easily replace ORB in systems such as ORB-SLAM. GCNv2 significantly improves the computational efficiency over GCN that was only able to run on desktop hardware. We show how a modified version of ORB-SLAM using GCNv2 features runs on a Jetson TX2, an embdded low-power platform. Experimental results show that GCNv2 retains almost the same accuracy as GCN and that it is robust enough to use for control of a flying drone.
* Project page: https://github.com/jiexiong2016/GCNv2_SLAM
View paper on