 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHyperproperty-Constrained Secure Reinforcement Learning
Jul 31, 2025Hyperproperties for Time Window Temporal Logic (HyperTWTL) is a domain-specific formal specification language known for its effectiveness in compactly representing security, opacity, and concurrency properties for robotics applications. This paper focuses on HyperTWTL-constrained secure reinforcement learning (SecRL). Although temporal logic-constrained safe reinforcement learning (SRL) is an evolving research problem with several existing literature, there is a significant research gap in exploring security-aware reinforcement learning (RL) using hyperproperties. Given the dynamics of an agent as a Markov Decision Process (MDP) and opacity/security constraints formalized as HyperTWTL, we propose an approach for learning security-aware optimal policies using dynamic Boltzmann softmax RL while satisfying the HyperTWTL constraints. The effectiveness and scalability of our proposed approach are demonstrated using a pick-up and delivery robotic mission case study. We also compare our results with two other baseline RL algorithms, showing that our proposed method outperforms them.
Model Checking Time Window Temporal Logic for Hyperproperties
Aug 10, 2023Hyperproperties extend trace properties to express properties of sets of traces, and they are increasingly popular in specifying various security and performance-related properties in domains such as cyber-physical systems, smart grids, and automotive. This paper introduces a model checking algorithm for a new formalism, HyperTWTL, which extends Time Window Temporal Logic (TWTL) -- a domain-specific formal specification language for robotics, by allowing explicit and simultaneous quantification over multiple execution traces. We present HyperTWTL with both \emph{synchronous} and \emph{asynchronous} semantics, based on the alignment of the timestamps in the traces. Consequently, we demonstrate the application of HyperTWTL in formalizing important information-flow security policies and concurrency for robotics applications. Finally, we propose a model checking algorithm for verifying fragments of HyperTWTL by reducing the problem to a TWTL model checking problem.
NNV: The Neural Network Verification Tool for Deep Neural Networks and Learning-Enabled Cyber-Physical Systems
Apr 12, 2020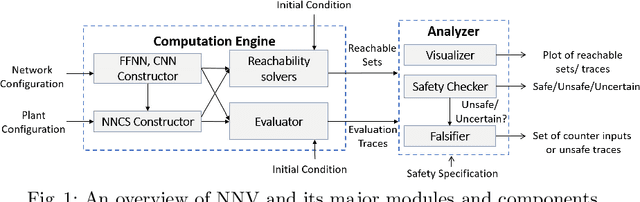
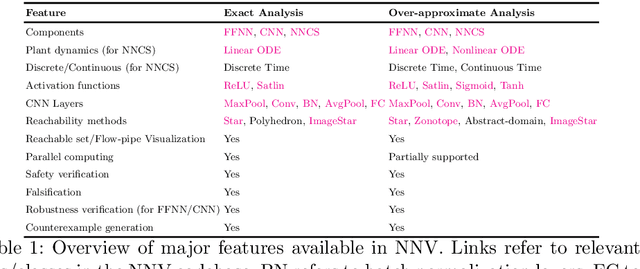
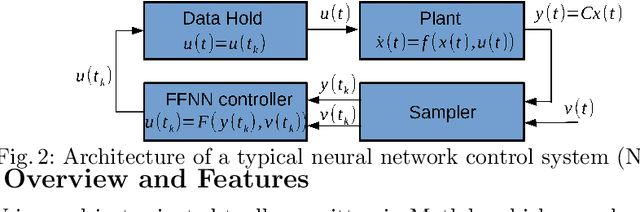
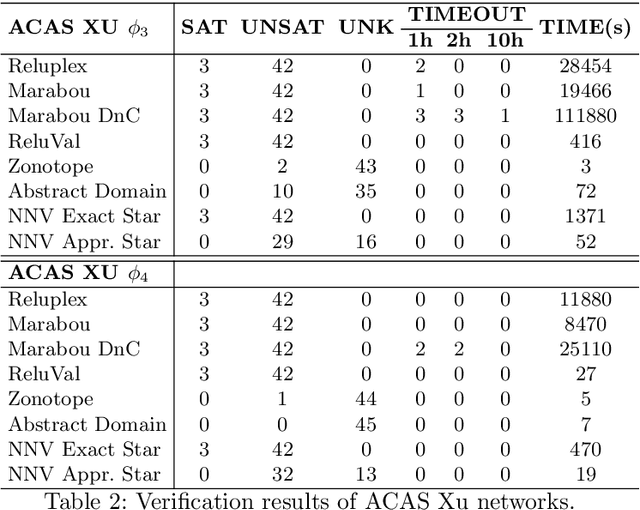
This paper presents the Neural Network Verification (NNV) software tool, a set-based verification framework for deep neural networks (DNNs) and learning-enabled cyber-physical systems (CPS). The crux of NNV is a collection of reachability algorithms that make use of a variety of set representations, such as polyhedra, star sets, zonotopes, and abstract-domain representations. NNV supports both exact (sound and complete) and over-approximate (sound) reachability algorithms for verifying safety and robustness properties of feed-forward neural networks (FFNNs) with various activation functions. For learning-enabled CPS, such as closed-loop control systems incorporating neural networks, NNV provides exact and over-approximate reachability analysis schemes for linear plant models and FFNN controllers with piecewise-linear activation functions, such as ReLUs. For similar neural network control systems (NNCS) that instead have nonlinear plant models, NNV supports over-approximate analysis by combining the star set analysis used for FFNN controllers with zonotope-based analysis for nonlinear plant dynamics building on CORA. We evaluate NNV using two real-world case studies: the first is safety verification of ACAS Xu networks and the second deals with the safety verification of a deep learning-based adaptive cruise control system.