 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimized Coordination Strategy for Multi-Aerospace Systems in Pick-and-Place Tasks By Deep Neural Network
Dec 13, 2024In this paper, we present an advanced strategy for the coordinated control of a multi-agent aerospace system, utilizing Deep Neural Networks (DNNs) within a reinforcement learning framework. Our approach centers on optimizing autonomous task assignment to enhance the system's operational efficiency in object relocation tasks, framed as an aerospace-oriented pick-and-place scenario. By modeling this coordination challenge within a MuJoCo environment, we employ a deep reinforcement learning algorithm to train a DNN-based policy to maximize task completion rates across the multi-agent system. The objective function is explicitly designed to maximize effective object transfer rates, leveraging neural network capabilities to handle complex state and action spaces in high-dimensional aerospace environments. Through extensive simulation, we benchmark the proposed method against a heuristic combinatorial approach rooted in game-theoretic principles, demonstrating a marked performance improvement, with the trained policy achieving up to 16\% higher task efficiency. Experimental validation is conducted on a multi-agent hardware setup to substantiate the efficacy of our approach in a real-world aerospace scenario.
DRAL: Deep Reinforcement Adaptive Learning for Multi-UAVs Navigation in Unknown Indoor Environment
Sep 05, 2024



Autonomous indoor navigation of UAVs presents numerous challenges, primarily due to the limited precision of GPS in enclosed environments. Additionally, UAVs' limited capacity to carry heavy or power-intensive sensors, such as overheight packages, exacerbates the difficulty of achieving autonomous navigation indoors. This paper introduces an advanced system in which a drone autonomously navigates indoor spaces to locate a specific target, such as an unknown Amazon package, using only a single camera. Employing a deep learning approach, a deep reinforcement adaptive learning algorithm is trained to develop a control strategy that emulates the decision-making process of an expert pilot. We demonstrate the efficacy of our system through real-time simulations conducted in various indoor settings. We apply multiple visualization techniques to gain deeper insights into our trained network. Furthermore, we extend our approach to include an adaptive control algorithm for coordinating multiple drones to lift an object in an indoor environment collaboratively. Integrating our DRAL algorithm enables multiple UAVs to learn optimal control strategies that adapt to dynamic conditions and uncertainties. This innovation enhances the robustness and flexibility of indoor navigation and opens new possibilities for complex multi-drone operations in confined spaces. The proposed framework highlights significant advancements in adaptive control and deep reinforcement learning, offering robust solutions for complex multi-agent systems in real-world applications.
Enhanced Self-Checkout System for Retail Based on Improved YOLOv10
Jul 31, 2024
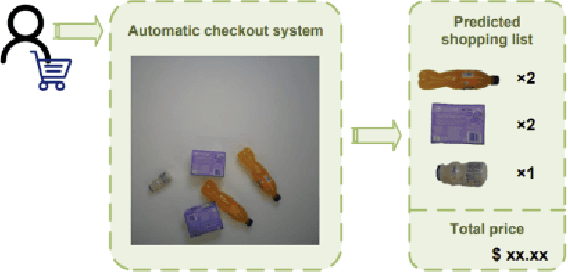
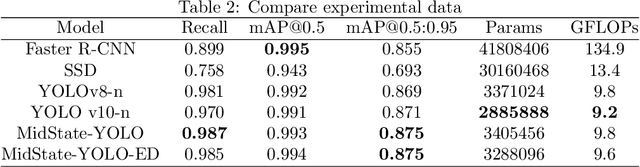
With the rapid advancement of deep learning technologies, computer vision has shown immense potential in retail automation. This paper presents a novel self-checkout system for retail based on an improved YOLOv10 network, aimed at enhancing checkout efficiency and reducing labor costs. We propose targeted optimizations to the YOLOv10 model, by incorporating the detection head structure from YOLOv8, which significantly improves product recognition accuracy. Additionally, we develop a post-processing algorithm tailored for self-checkout scenarios, to further enhance the application of system. Experimental results demonstrate that our system outperforms existing methods in both product recognition accuracy and checkout speed. This research not only provides a new technical solution for retail automation but offers valuable insights into optimizing deep learning models for real-world applications.