 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScalable Vision-Language-Action Model Pretraining for Robotic Manipulation with Real-Life Human Activity Videos
Oct 24, 2025



This paper presents a novel approach for pretraining robotic manipulation Vision-Language-Action (VLA) models using a large corpus of unscripted real-life video recordings of human hand activities. Treating human hand as dexterous robot end-effector, we show that "in-the-wild" egocentric human videos without any annotations can be transformed into data formats fully aligned with existing robotic V-L-A training data in terms of task granularity and labels. This is achieved by the development of a fully-automated holistic human activity analysis approach for arbitrary human hand videos. This approach can generate atomic-level hand activity segments and their language descriptions, each accompanied with framewise 3D hand motion and camera motion. We process a large volume of egocentric videos and create a hand-VLA training dataset containing 1M episodes and 26M frames. This training data covers a wide range of objects and concepts, dexterous manipulation tasks, and environment variations in real life, vastly exceeding the coverage of existing robot data. We design a dexterous hand VLA model architecture and pretrain the model on this dataset. The model exhibits strong zero-shot capabilities on completely unseen real-world observations. Additionally, fine-tuning it on a small amount of real robot action data significantly improves task success rates and generalization to novel objects in real robotic experiments. We also demonstrate the appealing scaling behavior of the model's task performance with respect to pretraining data scale. We believe this work lays a solid foundation for scalable VLA pretraining, advancing robots toward truly generalizable embodied intelligence.
Learning Adaptive Dexterous Grasping from Single Demonstrations
Mar 26, 2025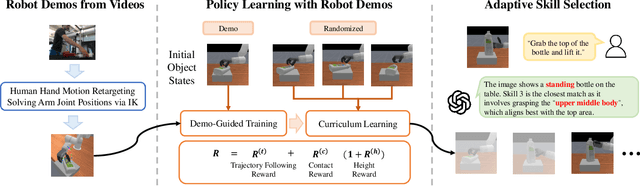
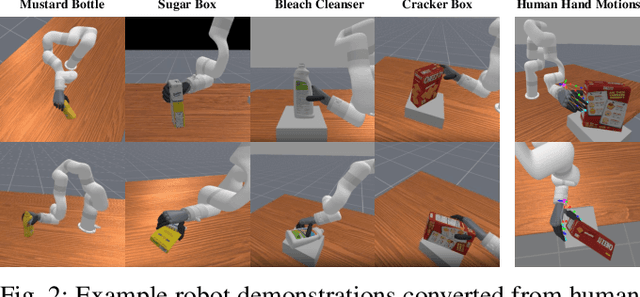
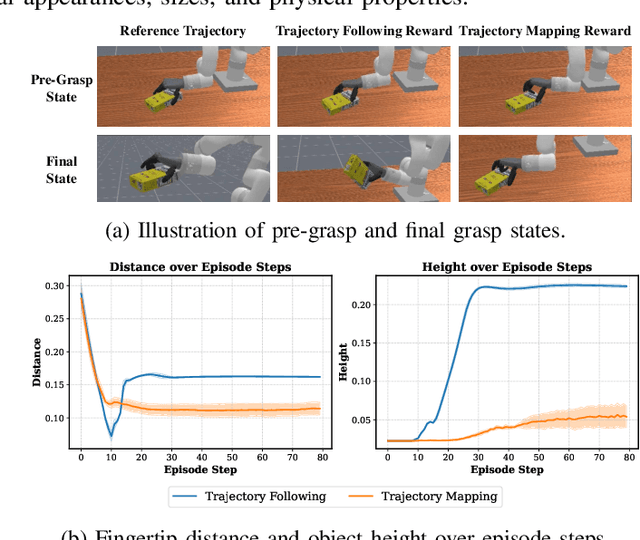
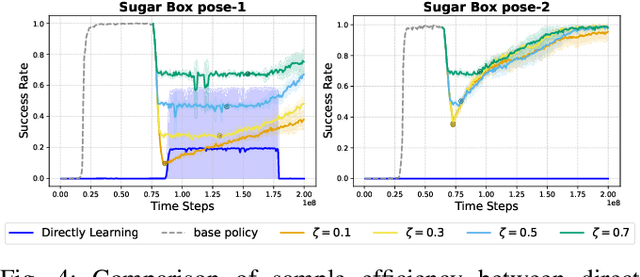
How can robots learn dexterous grasping skills efficiently and apply them adaptively based on user instructions? This work tackles two key challenges: efficient skill acquisition from limited human demonstrations and context-driven skill selection. We introduce AdaDexGrasp, a framework that learns a library of grasping skills from a single human demonstration per skill and selects the most suitable one using a vision-language model (VLM). To improve sample efficiency, we propose a trajectory following reward that guides reinforcement learning (RL) toward states close to a human demonstration while allowing flexibility in exploration. To learn beyond the single demonstration, we employ curriculum learning, progressively increasing object pose variations to enhance robustness. At deployment, a VLM retrieves the appropriate skill based on user instructions, bridging low-level learned skills with high-level intent. We evaluate AdaDexGrasp in both simulation and real-world settings, showing that our approach significantly improves RL efficiency and enables learning human-like grasp strategies across varied object configurations. Finally, we demonstrate zero-shot transfer of our learned policies to a real-world PSYONIC Ability Hand, with a 90% success rate across objects, significantly outperforming the baseline.
A novel dataset and a two-stage mitosis nuclei detection method based on hybrid anchor branch
Jan 18, 2023
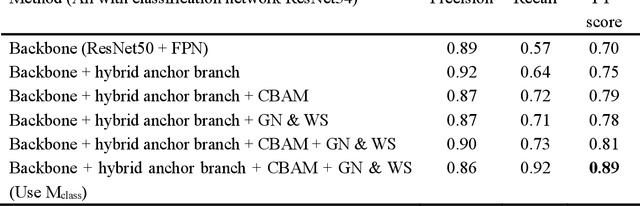
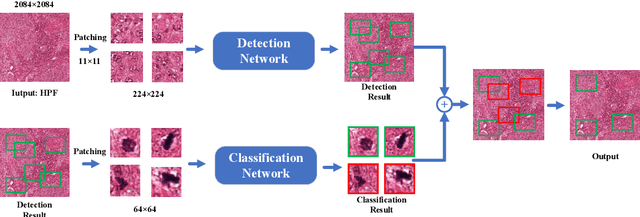
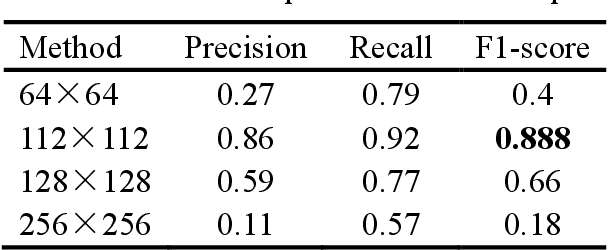
Mitosis detection is one of the challenging problems in computational pathology, and mitotic count is an important index of cancer grading for pathologists. However, current counts of mitotic nuclei rely on pathologists looking microscopically at the number of mitotic nuclei in hot spots, which is subjective and time-consuming. In this paper, we propose a two-stage cascaded network, named FoCasNet, for mitosis detection. In the first stage, a detection network named M_det is proposed to detect as many mitoses as possible. In the second stage, a classification network M_class is proposed to refine the results of the first stage. In addition, the attention mechanism, normalization method, and hybrid anchor branch classification subnet are introduced to improve the overall detection performance. Our method achieves the current highest F1-score of 0.888 on the public dataset ICPR 2012. We also evaluated our method on the GZMH dataset released by our research team for the first time and reached the highest F1-score of 0.563, which is also better than multiple classic detection networks widely used at present. It confirmed the effectiveness and generalization of our method. The code will be available at: https://github.com/antifen/mitosis-nuclei-detection.