 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDepthCache: Depth-Guided Training-Free Visual Token Merging for Vision-Language-Action Model Inference
Mar 11, 2026Vision-Language-Action (VLA) models enable generalist robotic manipulation but suffer from high inference latency. This bottleneck stems from the massive number of visual tokens processed by large language backbones. Existing methods either prune or merge tokens uniformly, degrading the spatial reasoning essential for robotic control. We present DepthCache, a training-free framework that leverages depth as a structural prior for visual token compression. It partitions observations into depth-based regions and applies spatially differentiated merge ratios, preserving the near-field workspace while compressing the distant background. To exploit temporal redundancy, DepthCache distributes the merging process across consecutive frames, ensuring consistent representations while reducing per-step computation. A motion-adaptive pipeline further optimizes auxiliary view compression based on end-effector dynamics. The framework requires no model modification, generalizing across diverse VLA architectures. On the LIBERO benchmark, DepthCache achieves up to 1.28x inference speedup with less than 1% average success rate degradation across three VLA models (pi_0.5, OpenVLA, GR00T), whereas pruning and merging baselines incur 4--24% degradation at comparable compression. Real-world experiments on a physical manipulator demonstrate that DepthCache enables faster task throughput and more responsive closed-loop control in latency-sensitive scenarios.
AsyncMDE: Real-Time Monocular Depth Estimation via Asynchronous Spatial Memory
Mar 11, 2026Foundation-model-based monocular depth estimation offers a viable alternative to active sensors for robot perception, yet its computational cost often prohibits deployment on edge platforms. Existing methods perform independent per-frame inference, wasting the substantial computational redundancy between adjacent viewpoints in continuous robot operation. This paper presents AsyncMDE, an asynchronous depth perception system consisting of a foundation model and a lightweight model that amortizes the foundation model's computational cost over time. The foundation model produces high-quality spatial features in the background, while the lightweight model runs asynchronously in the foreground, fusing cached memory with current observations through complementary fusion, outputting depth estimates, and autoregressively updating the memory. This enables cross-frame feature reuse with bounded accuracy degradation. At a mere 3.83M parameters, it operates at 237 FPS on an RTX 4090, recovering 77% of the accuracy gap to the foundation model while achieving a 25X parameter reduction. Validated across indoor static, dynamic, and synthetic extreme-motion benchmarks, AsyncMDE degrades gracefully between refreshes and achieves 161FPS on a Jetson AGX Orin with TensorRT, clearly demonstrating its feasibility for real-time edge deployment.
Omnidirectional Humanoid Locomotion on Stairs via Unsafe Stepping Penalty and Sparse LiDAR Elevation Mapping
Mar 09, 2026Humanoid robots, characterized by numerous degrees of freedom and a high center of gravity, are inherently unstable. Safe omnidirectional locomotion on stairs requires both omnidirectional terrain perception and reliable foothold selection. Existing methods often rely on forward-facing depth cameras, which create blind zones that restrict omnidirectional mobility. Furthermore, sparse post-contact unsafe stepping penalties lead to low learning efficiency and suboptimal strategies. To realize safe stair-traversal gaits, this paper introduces a single-stage training framework incorporating a dense unsafe stepping penalty that provides continuous feedback as the foot approaches a hazardous placement. To obtain stable and reliable elevation maps, we build a rolling point-cloud mapping system with spatiotemporal confidence decay and a self-protection zone mechanism, producing temporally consistent local maps. These maps are further refined by an Edge-Guided Asymmetric U-Net (EGAU), which mitigates reconstruction distortion caused by sparse LiDAR returns on stair risers. Simulation and real-robot experiments show that the proposed method achieves a near-100\% safe stepping rate on stair terrains in simulation, while maintaining a remarkably high safe stepping rate in real-world deployments. Furthermore, it completes a continuous long-distance walking test on complex outdoor terrains, demonstrating reliable sim-to-real transfer and long-term stability.
Periodic Bipedal Gait Learning Using Reward Composition Based on a Novel Gait Planner for Humanoid Robots
Jun 10, 2025This paper presents a periodic bipedal gait learning method using reward composition, integrated with a real-time gait planner for humanoid robots. First, we introduce a novel gait planner that incorporates dynamics to design the desired joint trajectory. In the gait design process, the 3D robot model is decoupled into two 2D models, which are then approximated as hybrid inverted pendulums (H-LIP) for trajectory planning. The gait planner operates in parallel in real time within the robot's learning environment. Second, based on this gait planner, we design three effective reward functions within a reinforcement learning framework, forming a reward composition to achieve periodic bipedal gait. This reward composition reduces the robot's learning time and enhances locomotion performance. Finally, a gait design example and performance comparison are presented to demonstrate the effectiveness of the proposed method.
MonoSLAM: Robust Monocular SLAM with Global Structure Optimization
Mar 12, 2025This paper presents a robust monocular visual SLAM system that simultaneously utilizes point, line, and vanishing point features for accurate camera pose estimation and mapping. To address the critical challenge of achieving reliable localization in low-texture environments, where traditional point-based systems often fail due to insufficient visual features, we introduce a novel approach leveraging Global Primitives structural information to improve the system's robustness and accuracy performance. Our key innovation lies in constructing vanishing points from line features and proposing a weighted fusion strategy to build Global Primitives in the world coordinate system. This strategy associates multiple frames with non-overlapping regions and formulates a multi-frame reprojection error optimization, significantly improving tracking accuracy in texture-scarce scenarios. Evaluations on various datasets show that our system outperforms state-of-the-art methods in trajectory precision, particularly in challenging environments.
Small-Gain Theorem Based Distributed Prescribed-Time Convex Optimization For Networked Euler-Lagrange Systems
Jul 28, 2024



In this paper, we address the distributed prescribed-time convex optimization (DPTCO) for a class of networked Euler-Lagrange systems under undirected connected graphs. By utilizing position-dependent measured gradient value of local objective function and local information interactions among neighboring agents, a set of auxiliary systems is constructed to cooperatively seek the optimal solution. The DPTCO problem is then converted to the prescribed-time stabilization problem of an interconnected error system. A prescribed-time small-gain criterion is proposed to characterize prescribed-time stabilization of the system, offering a novel approach that enhances the effectiveness beyond existing asymptotic or finite-time stabilization of an interconnected system. Under the criterion and auxiliary systems, innovative adaptive prescribed-time local tracking controllers are designed for subsystems. The prescribed-time convergence lies in the introduction of time-varying gains which increase to infinity as time tends to the prescribed time. Lyapunov function together with prescribed-time mapping are used to prove the prescribed-time stability of closed-loop system as well as the boundedness of internal signals. Finally, theoretical results are verified by one numerical example.
Hybrid Dynamics Modeling and Trajectory Planning for a Cable-Trailer System with a Quadruped Robot
Apr 18, 2024



Inspired by the utilization of dogs in sled-pulling for transportation, we introduce a cable-trailer system with a quadruped robot. The motion planning of the proposed robot system presents challenges arising from the nonholonomic constraints of the trailer, system underactuation, and hybrid interaction through the cable. To tackle these challenges, we develop a hybrid dynamics model that accounts for the cable's taut/slack status. Since it is computationally intense to directly optimize the trajectory, we first propose a search algorithm to compute a sub-optimal trajectory as the initial solution. Then, a novel collision avoidance constraint based on the geometric shapes of objects is proposed to formulate the trajectory optimization problem for the hybrid system. The proposed trajectory planning method is implemented on a Unitree A1 quadruped robot with a customized cable-trailer and validated through experiments.
Agile and Safe Trajectory Planning for Quadruped Navigation with Motion Anisotropy Awareness
Mar 15, 2024



Quadruped robots demonstrate robust and agile movements in various terrains; however, their navigation autonomy is still insufficient. One of the challenges is that the motion capabilities of the quadruped robot are anisotropic along different directions, which significantly affects the safety of quadruped robot navigation. This paper proposes a navigation framework that takes into account the motion anisotropy of quadruped robots including kinodynamic trajectory generation, nonlinear trajectory optimization, and nonlinear model predictive control. In simulation and real robot tests, we demonstrate that our motion-anisotropy-aware navigation framework could: (1) generate more efficient trajectories and realize more agile quadruped navigation; (2) significantly improve the navigation safety in challenging scenarios. The implementation is realized as an open-source package at https://github.com/ZWT006/agile_navigation.
Wasserstein Distributionally Robust Chance Constrained Trajectory Optimization for Mobile Robots within Uncertain Safe Corridor
Aug 31, 2023



Safe corridor-based Trajectory Optimization (TO) presents an appealing approach for collision-free path planning of autonomous robots, offering global optimality through its convex formulation. The safe corridor is constructed based on the perceived map, however, the non-ideal perception induces uncertainty, which is rarely considered in trajectory generation. In this paper, we propose Distributionally Robust Safe Corridor Constraints (DRSCCs) to consider the uncertainty of the safe corridor. Then, we integrate DRSCCs into the trajectory optimization framework using Bernstein basis polynomials. Theoretically, we rigorously prove that the trajectory optimization problem incorporating DRSCCs is equivalent to a computationally efficient, convex quadratic program. Compared to the nominal TO, our method enhances navigation safety by significantly reducing the infeasible motions in presence of uncertainty. Moreover, the proposed approach is validated through two robotic applications, a micro Unmanned Aerial Vehicle (UAV) and a quadruped robot Unitree A1.
BCNN: A Binary CNN with All Matrix Ops Quantized to 1 Bit Precision
Oct 06, 2020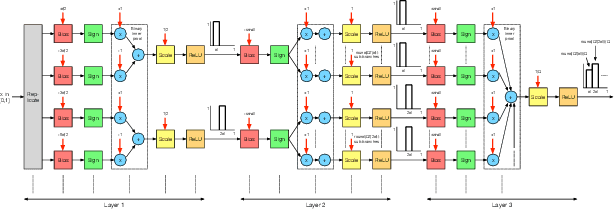
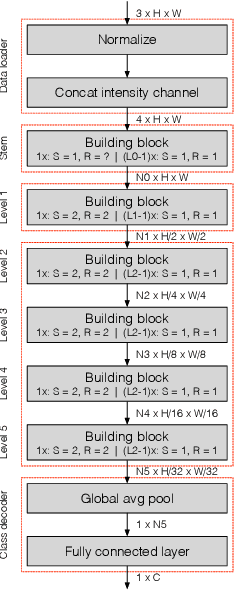
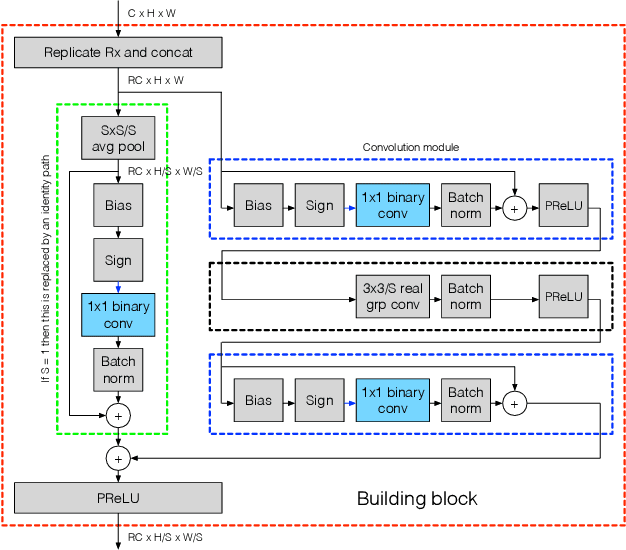
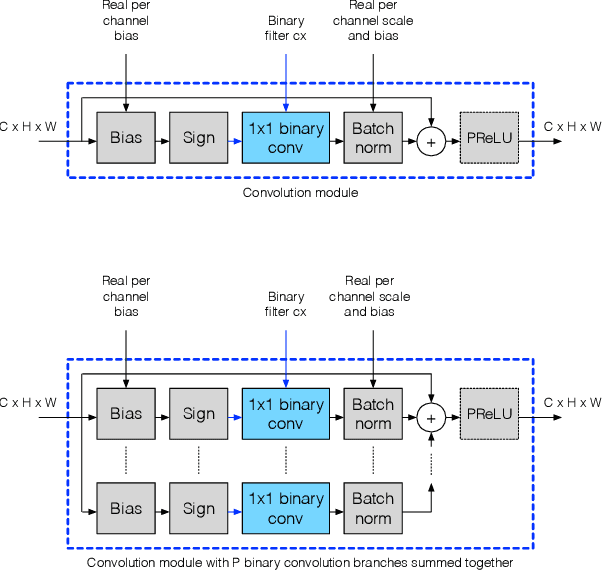
This paper describes a CNN where all CNN style 2D convolution operations that lower to matrix matrix multiplication are fully binary. The network is derived from a common building block structure that is consistent with a constructive proof outline showing that binary neural networks are universal function approximators. 68.96% accuracy on the 2012 ImageNet validation set was achieved with a 2 step training procedure and implementation strategies optimized for binary operands are provided.