 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePolicy Gradient for Robust Markov Decision Processes
Oct 29, 2024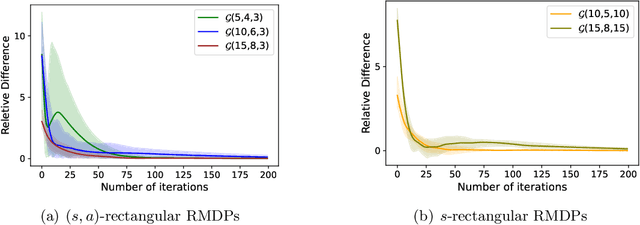
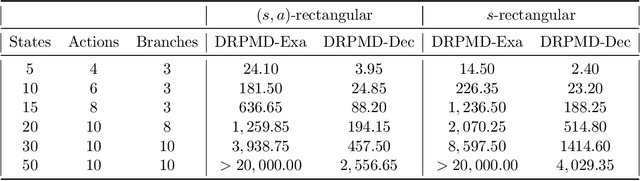
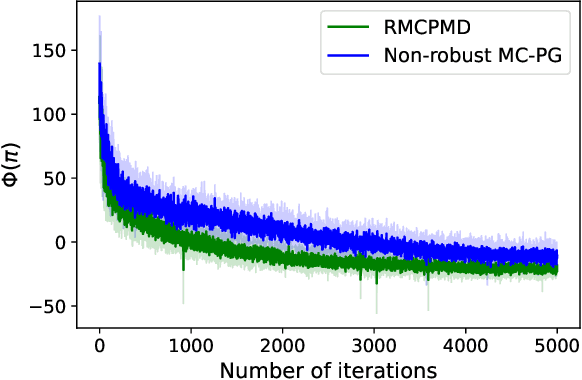
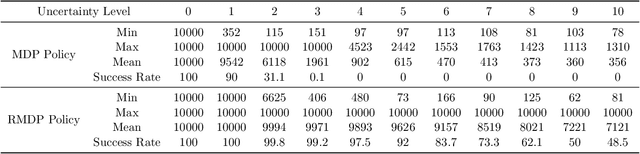
We develop a generic policy gradient method with the global optimality guarantee for robust Markov Decision Processes (MDPs). While policy gradient methods are widely used for solving dynamic decision problems due to their scalable and efficient nature, adapting these methods to account for model ambiguity has been challenging, often making it impractical to learn robust policies. This paper introduces a novel policy gradient method, Double-Loop Robust Policy Mirror Descent (DRPMD), for solving robust MDPs. DRPMD employs a general mirror descent update rule for the policy optimization with adaptive tolerance per iteration, guaranteeing convergence to a globally optimal policy. We provide a comprehensive analysis of DRPMD, including new convergence results under both direct and softmax parameterizations, and provide novel insights into the inner problem solution through Transition Mirror Ascent (TMA). Additionally, we propose innovative parametric transition kernels for both discrete and continuous state-action spaces, broadening the applicability of our approach. Empirical results validate the robustness and global convergence of DRPMD across various challenging robust MDP settings.
Hybrid Dynamics Modeling and Trajectory Planning for a Cable-Trailer System with a Quadruped Robot
Apr 18, 2024



Inspired by the utilization of dogs in sled-pulling for transportation, we introduce a cable-trailer system with a quadruped robot. The motion planning of the proposed robot system presents challenges arising from the nonholonomic constraints of the trailer, system underactuation, and hybrid interaction through the cable. To tackle these challenges, we develop a hybrid dynamics model that accounts for the cable's taut/slack status. Since it is computationally intense to directly optimize the trajectory, we first propose a search algorithm to compute a sub-optimal trajectory as the initial solution. Then, a novel collision avoidance constraint based on the geometric shapes of objects is proposed to formulate the trajectory optimization problem for the hybrid system. The proposed trajectory planning method is implemented on a Unitree A1 quadruped robot with a customized cable-trailer and validated through experiments.
Agile and Safe Trajectory Planning for Quadruped Navigation with Motion Anisotropy Awareness
Mar 15, 2024



Quadruped robots demonstrate robust and agile movements in various terrains; however, their navigation autonomy is still insufficient. One of the challenges is that the motion capabilities of the quadruped robot are anisotropic along different directions, which significantly affects the safety of quadruped robot navigation. This paper proposes a navigation framework that takes into account the motion anisotropy of quadruped robots including kinodynamic trajectory generation, nonlinear trajectory optimization, and nonlinear model predictive control. In simulation and real robot tests, we demonstrate that our motion-anisotropy-aware navigation framework could: (1) generate more efficient trajectories and realize more agile quadruped navigation; (2) significantly improve the navigation safety in challenging scenarios. The implementation is realized as an open-source package at https://github.com/ZWT006/agile_navigation.
Wasserstein Distributionally Robust Chance Constrained Trajectory Optimization for Mobile Robots within Uncertain Safe Corridor
Aug 31, 2023



Safe corridor-based Trajectory Optimization (TO) presents an appealing approach for collision-free path planning of autonomous robots, offering global optimality through its convex formulation. The safe corridor is constructed based on the perceived map, however, the non-ideal perception induces uncertainty, which is rarely considered in trajectory generation. In this paper, we propose Distributionally Robust Safe Corridor Constraints (DRSCCs) to consider the uncertainty of the safe corridor. Then, we integrate DRSCCs into the trajectory optimization framework using Bernstein basis polynomials. Theoretically, we rigorously prove that the trajectory optimization problem incorporating DRSCCs is equivalent to a computationally efficient, convex quadratic program. Compared to the nominal TO, our method enhances navigation safety by significantly reducing the infeasible motions in presence of uncertainty. Moreover, the proposed approach is validated through two robotic applications, a micro Unmanned Aerial Vehicle (UAV) and a quadruped robot Unitree A1.