 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDRQN-based 3D Obstacle Avoidance with a Limited Field of View
Aug 12, 2021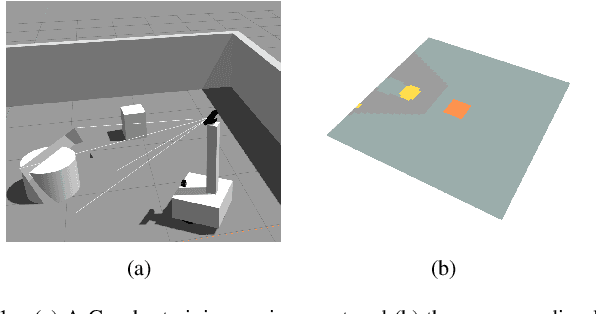
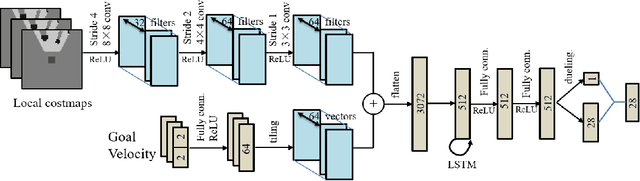
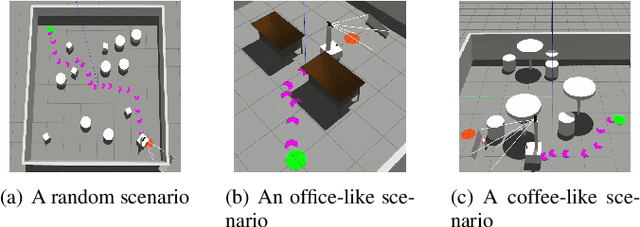
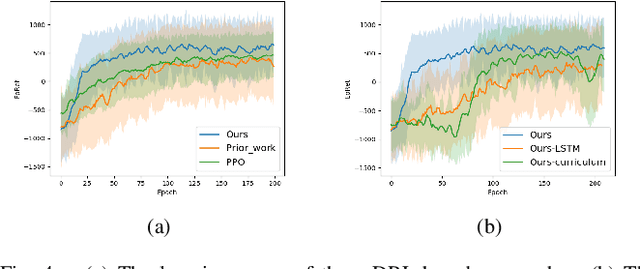
In this paper, we propose a map-based end-to-end DRL approach for three-dimensional (3D) obstacle avoidance in a partially observed environment, which is applied to achieve autonomous navigation for an indoor mobile robot using a depth camera with a narrow field of view. We first train a neural network with LSTM units in a 3D simulator of mobile robots to approximate the Q-value function in double DRQN. We also use a curriculum learning strategy to accelerate and stabilize the training process. Then we deploy the trained model to a real robot to perform 3D obstacle avoidance in its navigation. We evaluate the proposed approach both in the simulated environment and on a robot in the real world. The experimental results show that the approach is efficient and easy to be deployed, and it performs well for 3D obstacle avoidance with a narrow observation angle, which outperforms other existing DRL-based models by 15.5% on success rate.
Robot Navigation with Map-Based Deep Reinforcement Learning
Feb 11, 2020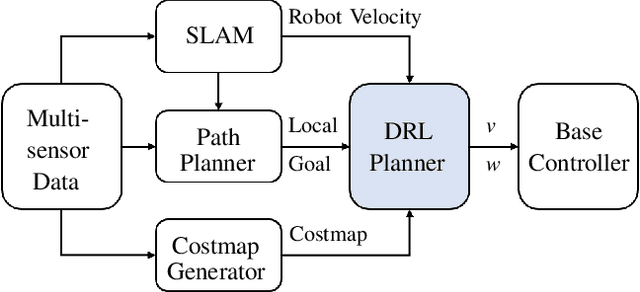
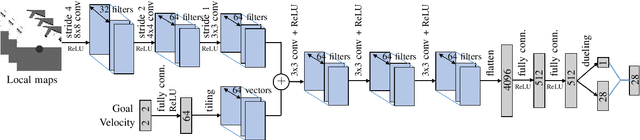
This paper proposes an end-to-end deep reinforcement learning approach for mobile robot navigation with dynamic obstacles avoidance. Using experience collected in a simulation environment, a convolutional neural network (CNN) is trained to predict proper steering actions of a robot from its egocentric local occupancy maps, which accommodate various sensors and fusion algorithms. The trained neural network is then transferred and executed on a real-world mobile robot to guide its local path planning. The new approach is evaluated both qualitatively and quantitatively in simulation and real-world robot experiments. The results show that the map-based end-to-end navigation model is easy to be deployed to a robotic platform, robust to sensor noise and outperforms other existing DRL-based models in many indicators.