 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Estimate: A Real-Time Online Learning Framework for MIMO-OFDM Channel Estimation
May 22, 2023



In this paper we introduce StructNet-CE, a novel real-time online learning framework for MIMO-OFDM channel estimation, which only utilizes over-the-air (OTA) pilot symbols for online training and converges within one OFDM subframe. The design of StructNet-CE leverages the structure information in the MIMO-OFDM system, including the repetitive structure of modulation constellation and the invariant property of symbol classification to inter-stream interference. The embedded structure information enables StructNet-CE to conduct channel estimation with a binary classification task and accurately learn channel coefficients with as few as two pilot OFDM symbols. Experiments show that the channel estimation performance is significantly improved with the incorporation of structure knowledge. StructNet-CE is compatible and readily applicable to current and future wireless networks, demonstrating the effectiveness and importance of combining machine learning techniques with domain knowledge for wireless communication systems.
Learn to Detect and Detect to Learn: Structure Learning and Decision Feedback for MIMO-OFDM Receive Processing
Aug 17, 2022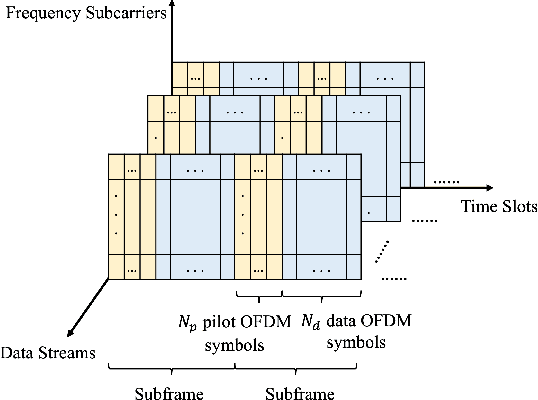
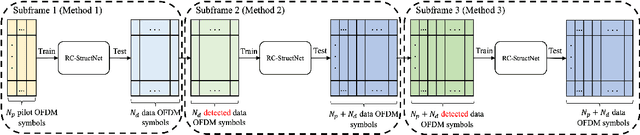
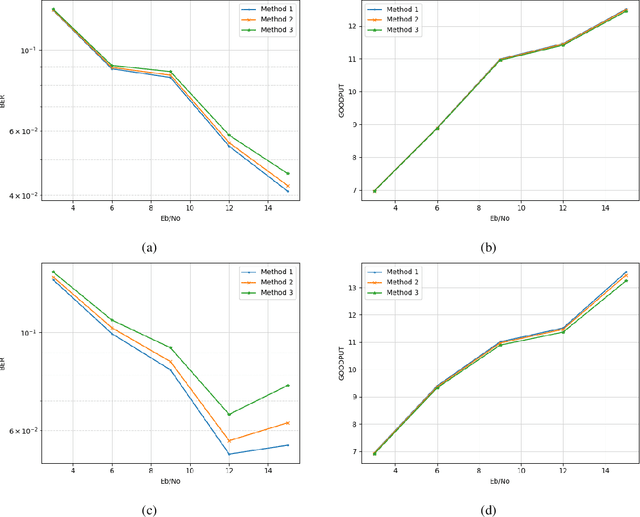

One of the major open challenges in MIMO-OFDM receive processing is how to efficiently and effectively utilize the extremely limited over-the-air pilot symbols to detect the transmitted data symbols. Recent advances have been devoted to investigating effective ways to utilize the limited pilots. However, we notice that besides exploiting the pilots, one can take advantage of the data symbols to improve the detection performance. Thus, this paper introduces an online subframe-based approach, namely RC-StructNet, that can efficiently learn from the precious pilot symbols and be dynamically updated with the detected payload data using the decision feedback (DF) approach. The network consists of a reservoir computing (RC) module in the time domain and a neural network StructNet in the frequency domain. The unique design of the network allows it to be dynamically updated with the changes of the channel by learning from the detected data symbols. Experiments demonstrate the effectiveness of RC-StructNet in detection under dynamic transmission modes and in reducing the training overhead requirement when taking the DF approach.
RC-Struct: A Structure-based Neural Network Approach for MIMO-OFDM Detection
Oct 03, 2021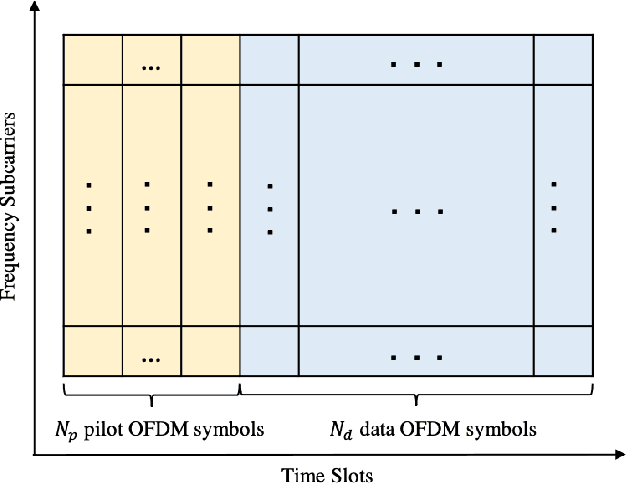
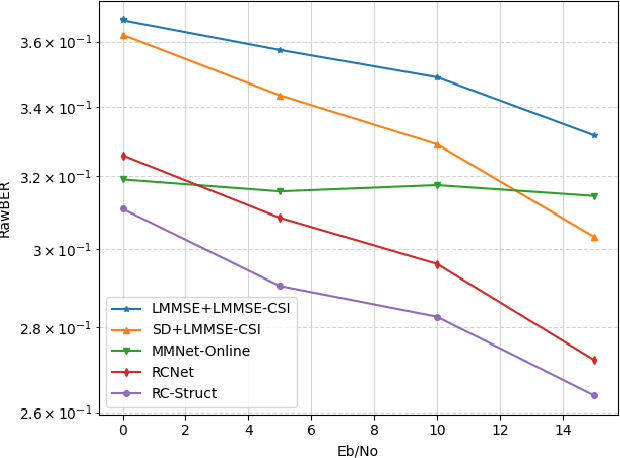
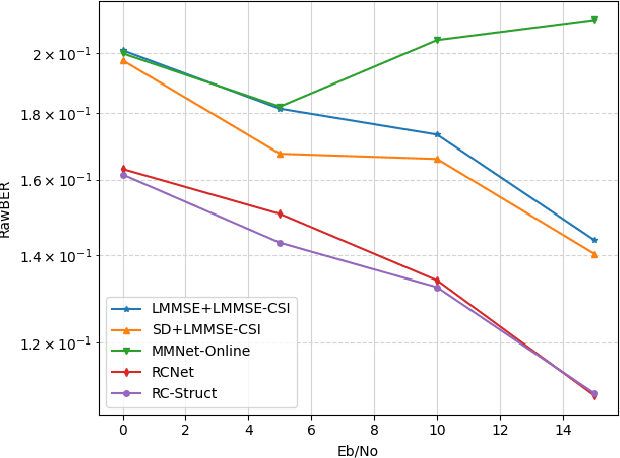
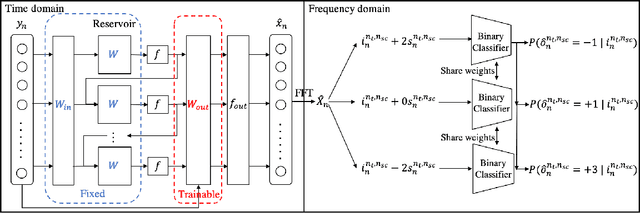
In this paper, we introduce a structure-based neural network architecture, namely RC-Struct, for MIMO-OFDM symbol detection. The RC-Struct exploits the temporal structure of the MIMO-OFDM signals through reservoir computing (RC). A binary classifier leverages the repetitive constellation structure in the system to perform multi-class detection. The incorporation of RC allows the RC-Struct to be learned in a purely online fashion with extremely limited pilot symbols in each OFDM subframe. The binary classifier enables the efficient utilization of the precious online training symbols and allows an easy extension to high-order modulations without a substantial increase in complexity. Experiments show that the introduced RC-Struct outperforms both the conventional model-based symbol detection approaches and the state-of-the-art learning-based strategies in terms of bit error rate (BER). The advantages of RC-Struct over existing methods become more significant when rank and link adaptation are adopted. The introduced RC-Struct sheds light on combining communication domain knowledge and learning-based receive processing for 5G and 5G Beyond.
Haptic-enabled Mixed Reality System for Mixed-initiative Remote Robot Control
Feb 06, 2021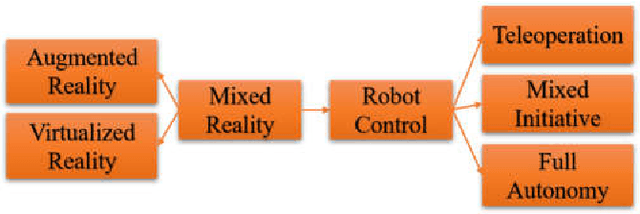

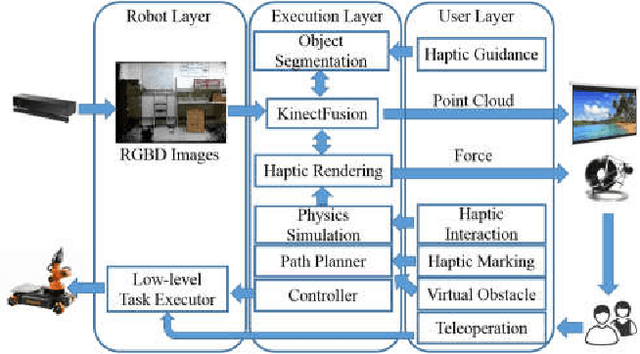

Robots assist in many areas that are considered unsafe for humans to operate. For instance, in handling pandemic diseases such as the recent Covid-19 outbreak and other outbreaks like Ebola, robots can assist in reaching areas dangerous for humans and do simple tasks such as pick up the correct medicine (among a set of bottles prescribed) and deliver to patients. In such cases, it might not be good to rely on the fully autonomous operation of robots. Since many mobile robots are fully functional with low-level tasks such as grabbing and moving, we consider the mixed-initiative control where the user can guide the robot remotely to finish such tasks. For this mixed-initiative control, the user controlling the robot needs to visualize a 3D scene as seen by the robot and guide it. Mixed reality can virtualize reality and immerse users in the 3D scene that is reconstructed from the real-world environment. This technique provides the user more freedom such as choosing viewpoints at view time. In recent years, benefiting from the high-quality data from Light Detection and Ranging (LIDAR) and RGBD cameras, mixed reality is widely used to build networked platforms to improve the performance of robot teleoperations and robot-human collaboration, and enhanced feedback for mixed-initiative control. In this paper, we proposed a novel haptic-enabled mixed reality system, that provides haptic interfaces to interact with the virtualized environments and give remote guidance for mobile robots towards high-level tasks. The experimental results show the effectiveness and flexibility of the proposed haptic enabled mixed reality system.
Federated Learning in Mobile Edge Computing: An Edge-Learning Perspective for Beyond 5G
Jul 15, 2020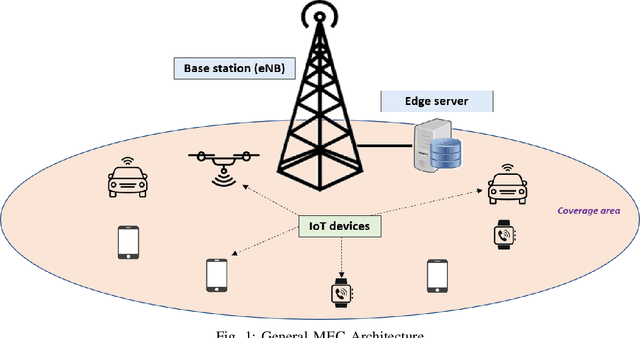
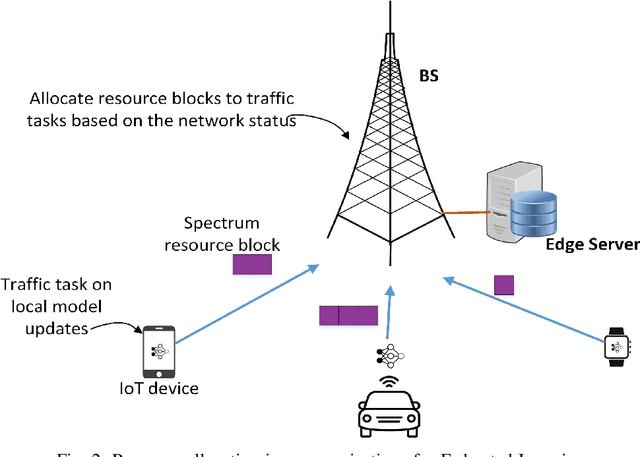
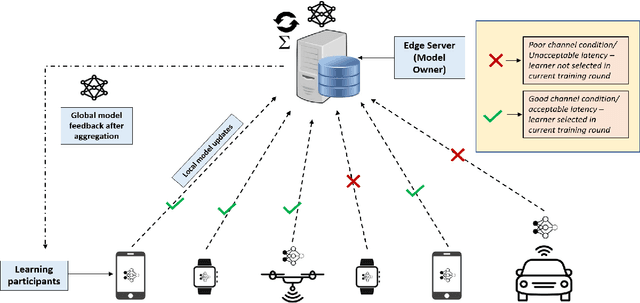
Owing to the large volume of sensed data from the enormous number of IoT devices in operation today, centralized machine learning algorithms operating on such data incur an unbearable training time, and thus cannot satisfy the requirements of delay-sensitive inference applications. By provisioning computing resources at the network edge, Mobile Edge Computing (MEC) has become a promising technology capable of collaborating with distributed IoT devices to facilitate federated learning, and thus realize real-time training. However, considering the large volume of sensed data and the limited resources of both edge servers and IoT devices, it is challenging to ensure the training efficiency and accuracy of delay-sensitive training tasks. Thus, in this paper, we design a novel edge computing-assisted federated learning framework, in which the communication constraints between IoT devices and edge servers and the effect of various IoT devices on the training accuracy are taken into account. On one hand, we employ machine learning methods to dynamically configure the communication resources in real-time to accelerate the interactions between IoT devices and edge servers, thus improving the training efficiency of federated learning. On the other hand, as various IoT devices have different training datasets which have varying influence on the accuracy of the global model derived at the edge server, an IoT device selection scheme is designed to improve the training accuracy under the resource constraints at edge servers. Extensive simulations have been conducted to demonstrate the performance of the introduced edge computing-assisted federated learning framework.