 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Reliable Are Semantic-ID Tokenizer Comparisons in Generative Recommendation?
May 25, 2026In Semantic-ID (SID) based generative recommendation, each item is represented as a sequence of discrete codes, and an autoregressive model is trained to generate the SID sequence of the next item; top-K performance is then measured by checking whether the SID sequence of the target item appears among the generated sequences. This evaluation protocol equates SID-level matching with item-level recommendation, an equivalence that holds only when every SID sequence maps to a single item. We show this assumption breaks down in practice: because tokenizers compress item features into a code space, semantically similar but collaboratively distinct items are frequently assigned the same SID sequence. Across four datasets and five representative tokenizers, the fraction of items involved in such collisions reaches 30.5%, so matching a shared SID sequence identifies only a collision group rather than the target item. Consequently, SID-level metrics overestimate item-level performance (Hit@10 is inflated by up to 103.36%), and the inflation grows with the collision rate. To support faithful comparison, we develop collision-aware item-level metrics computed directly from generated SID sequences, together with a post-tokenizer procedure that reassigns last-level SIDs at minimum cost to obtain a collision-free assignment for any existing tokenizer. Our results indicate that SID-level rankings in prior work should be interpreted with caution, and that reliable tokenizer evaluation requires either item-level correction or collision-free SID assignments.
CAST: Modeling Semantic-Level Transitions for Complementary-Aware Sequential Recommendation
Apr 21, 2026Sequential Recommendation (SR) aims to predict the next interaction of a user based on their behavior sequence, where complementary relations often provide essential signals for predicting the next item. However, mainstream models relying on sparse co-purchase statistics often mistake spurious correlations (e.g., due to popularity bias) for true complementary relations. Identifying true complementary relations requires capturing the fine-grained item semantics (e.g., specifications) that simple cooccurrence statistics would be unable to model. While recent semantics-based methods utilize discrete semantic codes to represent items, they typically aggregate semantic codes into coarse item representations. This aggregation process blurs specific semantic details required to identify complementarity. To address these critical limitations and effectively leverage semantics for capturing reliable complementary relations, we propose a Complementary-Aware Semantic Transition (CAST) framework that introduces a new modeling paradigm built upon semantic-level transitions. Specifically, a semantic-level transition module is designed to model dynamic transitions directly in the discrete semantic code space, effectively capturing fine-grained semantic dependencies often lost in aggregated item representations. Then, a complementary prior injection module is designed to incorporate LLM-verified complementary priors into the attention mechanism, thereby prioritizing complementary patterns over co-occurrence statistics. Experiments on multiple e-commerce datasets demonstrate that CAST consistently outperforms the state-of-the-art approaches, achieving up to 17.6% Recall and 16.0% NDCG gains with 65x training acceleration. This validates its effectiveness and efficiency in uncovering latent item complementarity beyond statistics. The code will be released upon acceptance.
Classifying States of the Hopfield Network with Improved Accuracy, Generalization, and Interpretability
Mar 04, 2025


We extend the existing work on Hopfield network state classification, employing more complex models that remain interpretable, such as densely-connected feed-forward deep neural networks and support vector machines. The states of the Hopfield network can be grouped into several classes, including learned (those presented during training), spurious (stable states that were not learned), and prototype (stable states that were not learned but are representative for a subset of learned states). It is often useful to determine to what class a given state belongs to; for example to ignore spurious states when retrieving from the network. Previous research has approached the state classification task with simple linear methods, most notably the stability ratio. We deepen the research on classifying states from prototype-regime Hopfield networks, investigating how varying the factors strengthening prototypes influences the state classification task. We study the generalizability of different classification models when trained on states derived from different prototype tasks -- for example, can a network trained on a Hopfield network with 10 prototypes classify states from a network with 20 prototypes? We find that simple models often outperform the stability ratio while remaining interpretable. These models require surprisingly little training data and generalize exceptionally well to states generated by a range of Hopfield networks, even those that were trained on exceedingly different datasets.
Conceptual capacity and effective complexity of neural networks
Mar 13, 2021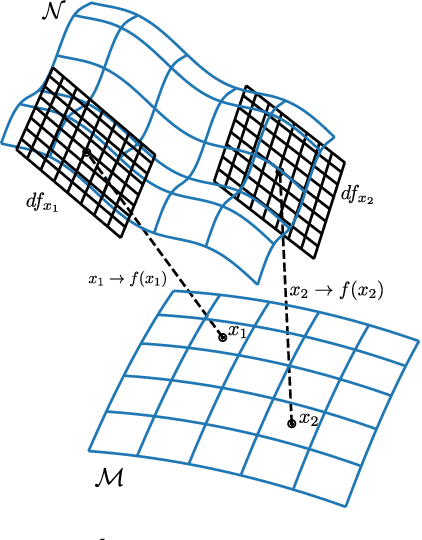
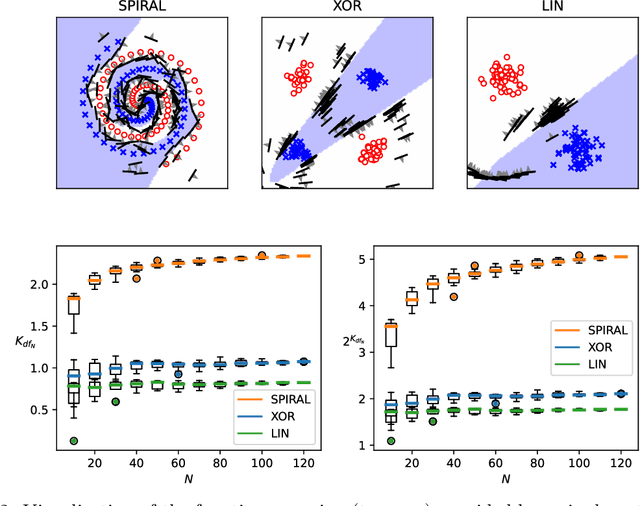
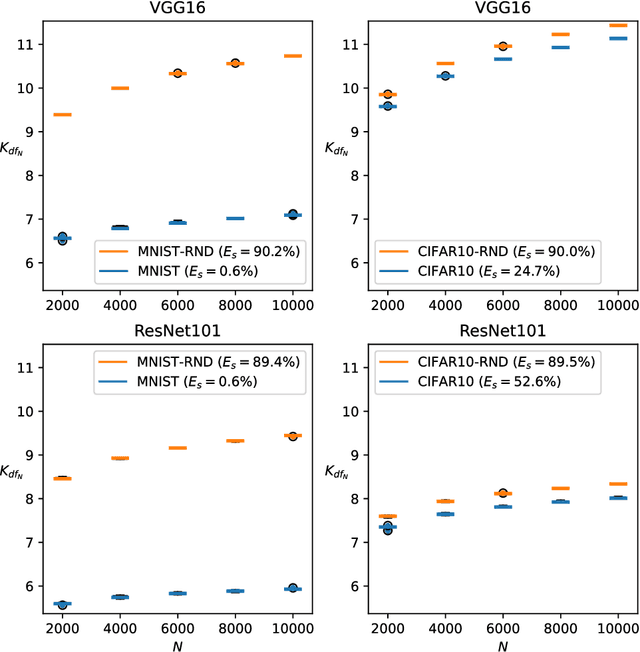
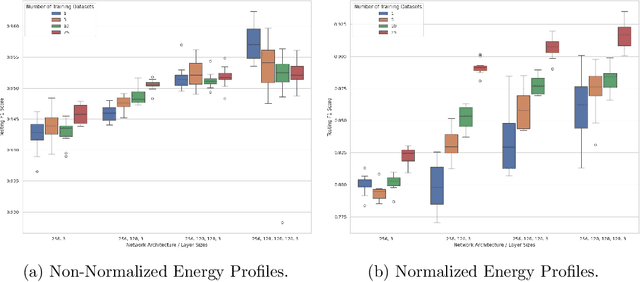
We propose a complexity measure of a neural network mapping function based on the diversity of the set of tangent spaces from different inputs. Treating each tangent space as a linear PAC concept we use an entropy-based measure of the bundle of concepts in order to estimate the conceptual capacity of the network. The theoretical maximal capacity of a ReLU network is equivalent to the number of its neurons. In practice however, due to correlations between neuron activities within the network, the actual capacity can be remarkably small, even for very big networks. Empirical evaluations show that this new measure is correlated with the complexity of the mapping function and thus the generalisation capabilities of the corresponding network. It captures the effective, as oppose to the theoretical, complexity of the network function. We also showcase some uses of the proposed measure for analysis and comparison of trained neural network models.
MIME: Mutual Information Minimisation Exploration
Jan 16, 2020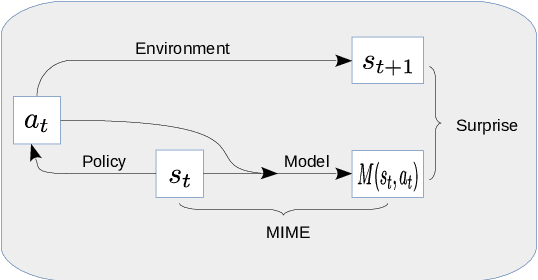
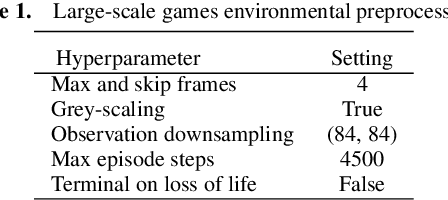
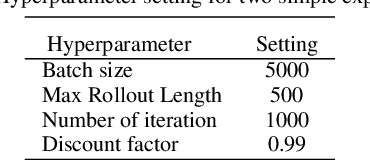
We show that reinforcement learning agents that learn by surprise (surprisal) get stuck at abrupt environmental transition boundaries because these transitions are difficult to learn. We propose a counter-intuitive solution that we call Mutual Information Minimising Exploration (MIME) where an agent learns a latent representation of the environment without trying to predict the future states. We show that our agent performs significantly better over sharp transition boundaries while matching the performance of surprisal driven agents elsewhere. In particular, we show state-of-the-art performance on difficult learning games such as Gravitar, Montezuma's Revenge and Doom.
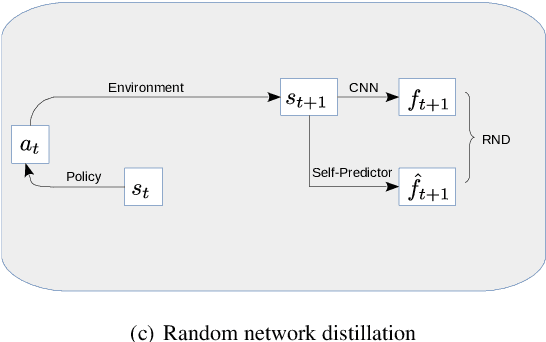
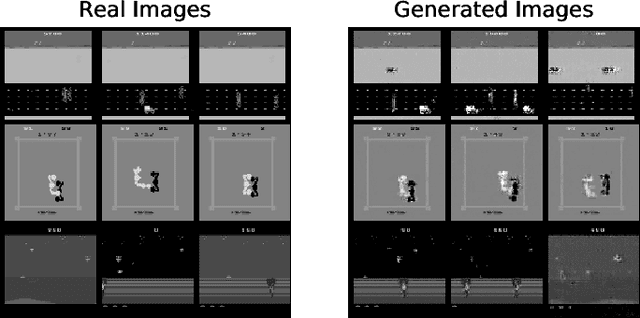
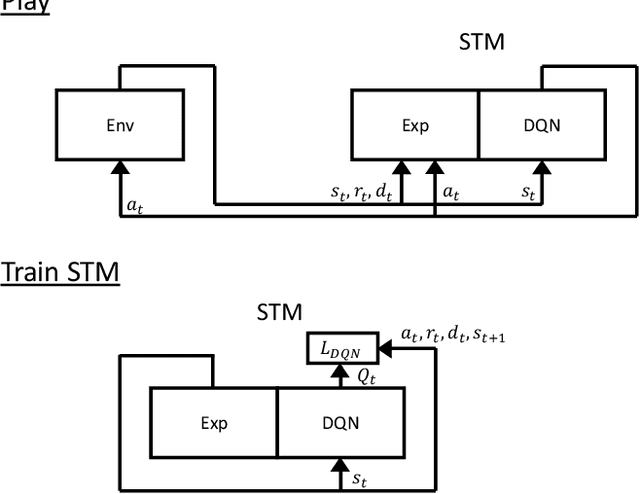
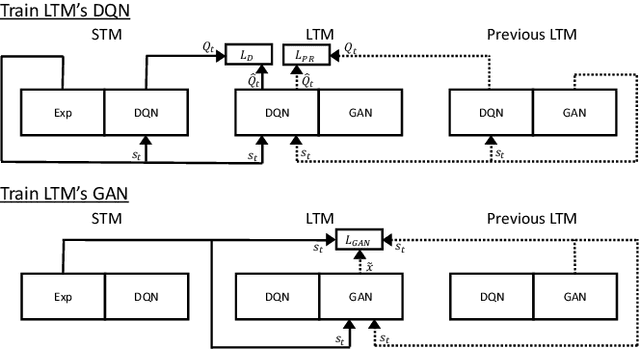
GRIm-RePR: Prioritising Generating Important Features for Pseudo-Rehearsal
Nov 27, 2019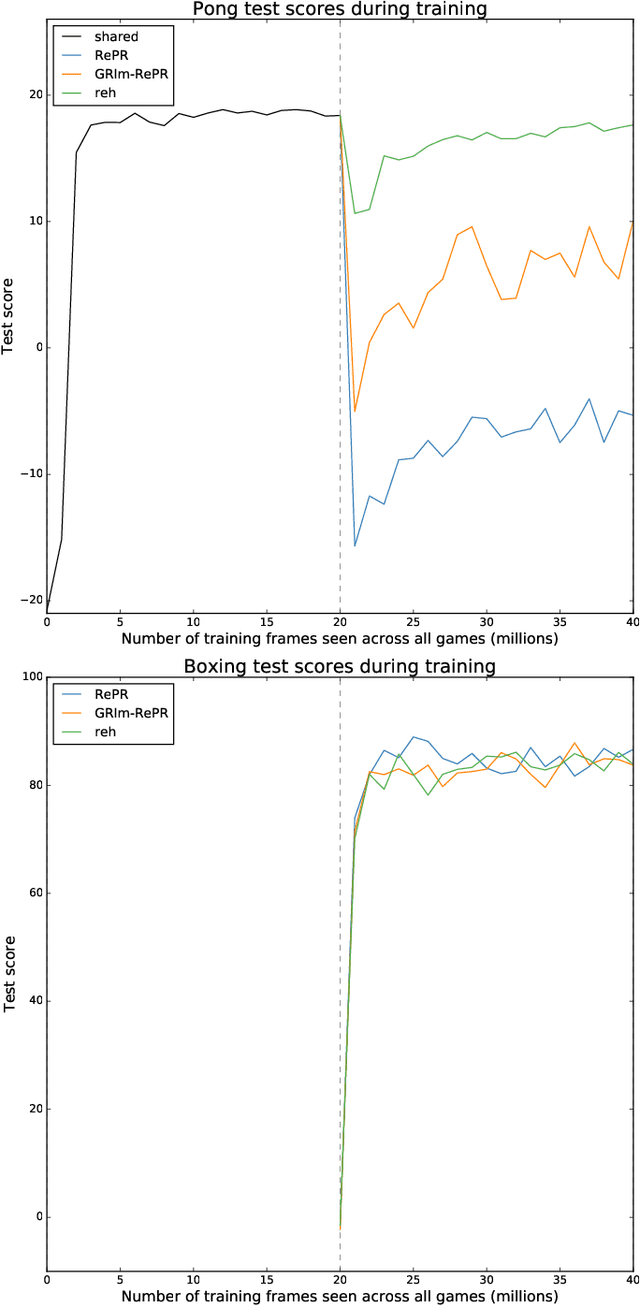
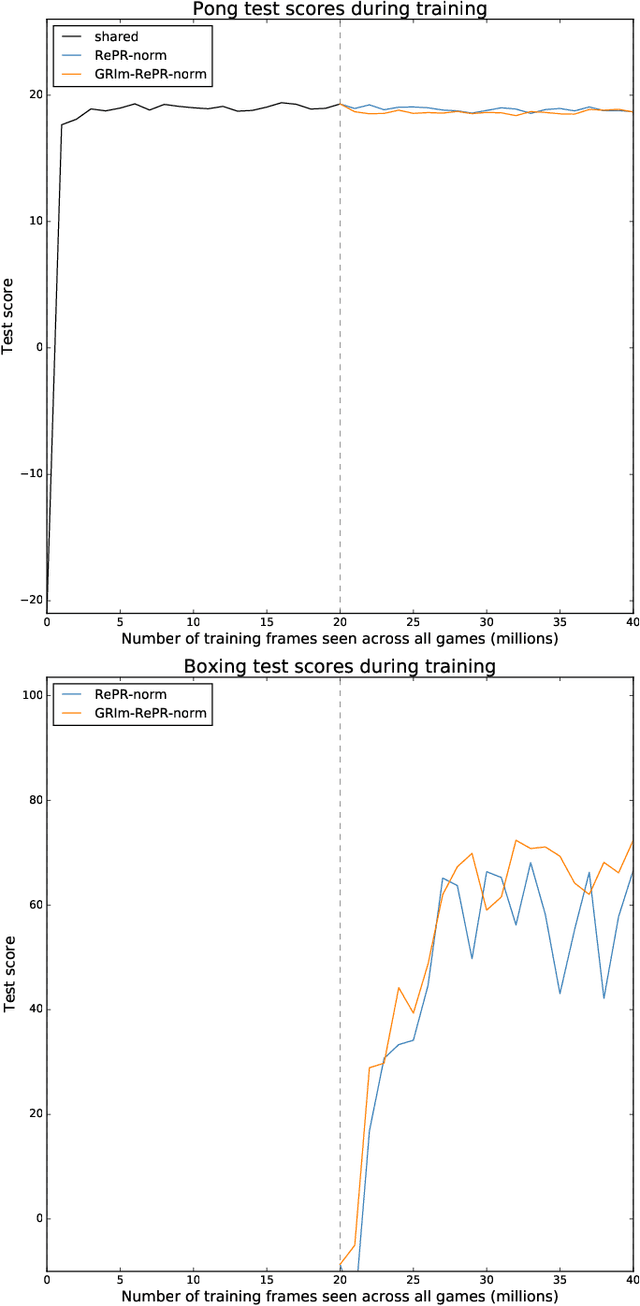
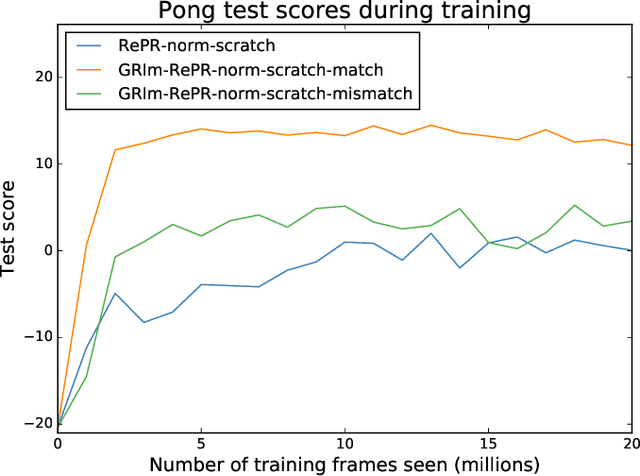
Pseudo-rehearsal allows neural networks to learn a sequence of tasks without forgetting how to perform in earlier tasks. Preventing forgetting is achieved by introducing a generative network which can produce data from previously seen tasks so that it can be rehearsed along side learning the new task. This has been found to be effective in both supervised and reinforcement learning. Our current work aims to further prevent forgetting by encouraging the generator to accurately generate features important for task retention. More specifically, the generator is improved by introducing a second discriminator into the Generative Adversarial Network which learns to classify between real and fake items from the intermediate activation patterns that they produce when fed through a continual learning agent. Using Atari 2600 games, we experimentally find that improving the generator can considerably reduce catastrophic forgetting compared to the standard pseudo-rehearsal methods used in deep reinforcement learning. Furthermore, we propose normalising the Q-values taught to the long-term system as we observe this substantially reduces catastrophic forgetting by minimising the interference between tasks' reward functions.
VASE: Variational Assorted Surprise Exploration for Reinforcement Learning
Oct 31, 2019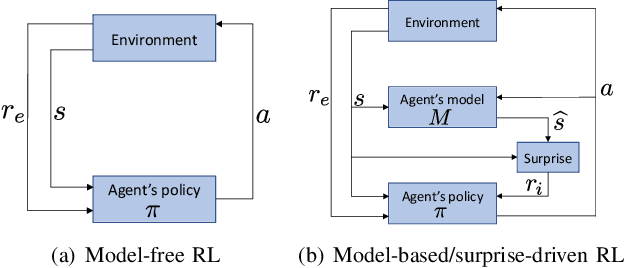
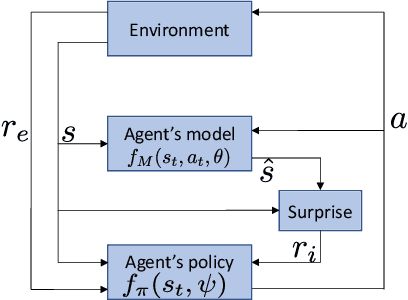
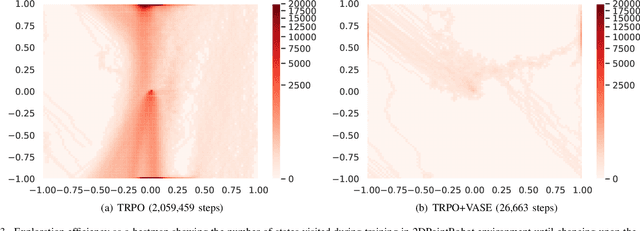
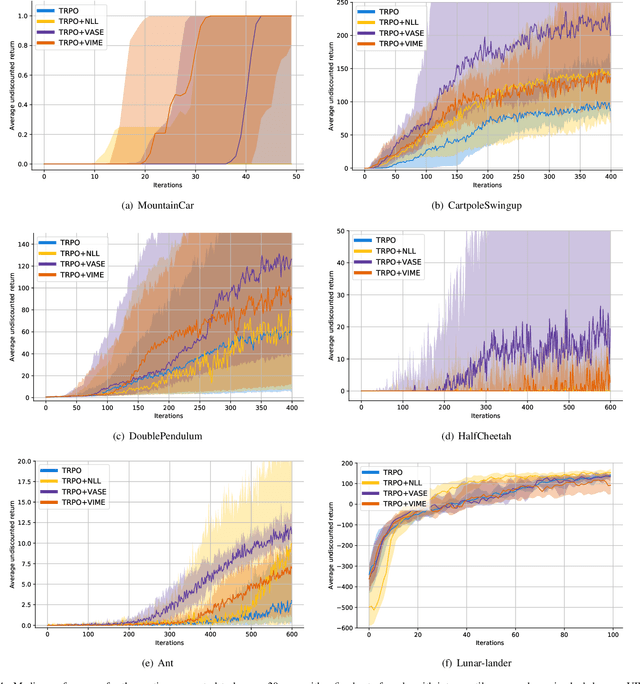
Exploration in environments with continuous control and sparse rewards remains a key challenge in reinforcement learning (RL). Recently, surprise has been used as an intrinsic reward that encourages systematic and efficient exploration. We introduce a new definition of surprise and its RL implementation named Variational Assorted Surprise Exploration (VASE). VASE uses a Bayesian neural network as a model of the environment dynamics and is trained using variational inference, alternately updating the accuracy of the agent's model and policy. Our experiments show that in continuous control sparse reward environments VASE outperforms other surprise-based exploration techniques.
Switched linear projections and inactive state sensitivity for deep neural network interpretability
Sep 25, 2019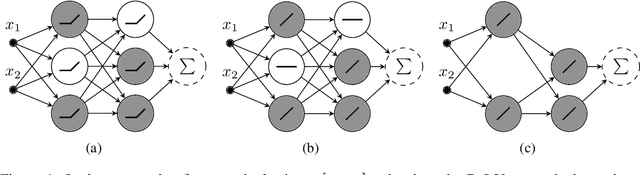
We introduce switched linear projections for expressing the activity of a neuron in a ReLU-based deep neural network in terms of a single linear projection in the input space. The method works by isolating the active subnetwork, a series of linear transformations, that completely determine the entire computation of the deep network for a given input instance. We also propose that for interpretability it is more instructive and meaningful to focus on the patterns that deactive the neurons in the network, which are ignored by the exisiting methods that implicitly track only the active aspect of the network's computation. We introduce a novel interpretability method for the inactive state sensitivity (Insens). Comparison against existing methods shows that Insens is more robust (in the presence of noise), more complete (in terms of patterns that affect the computation) and a very effective interpretability method for deep neural networks.
Pseudo-Rehearsal: Achieving Deep Reinforcement Learning without Catastrophic Forgetting
Dec 06, 2018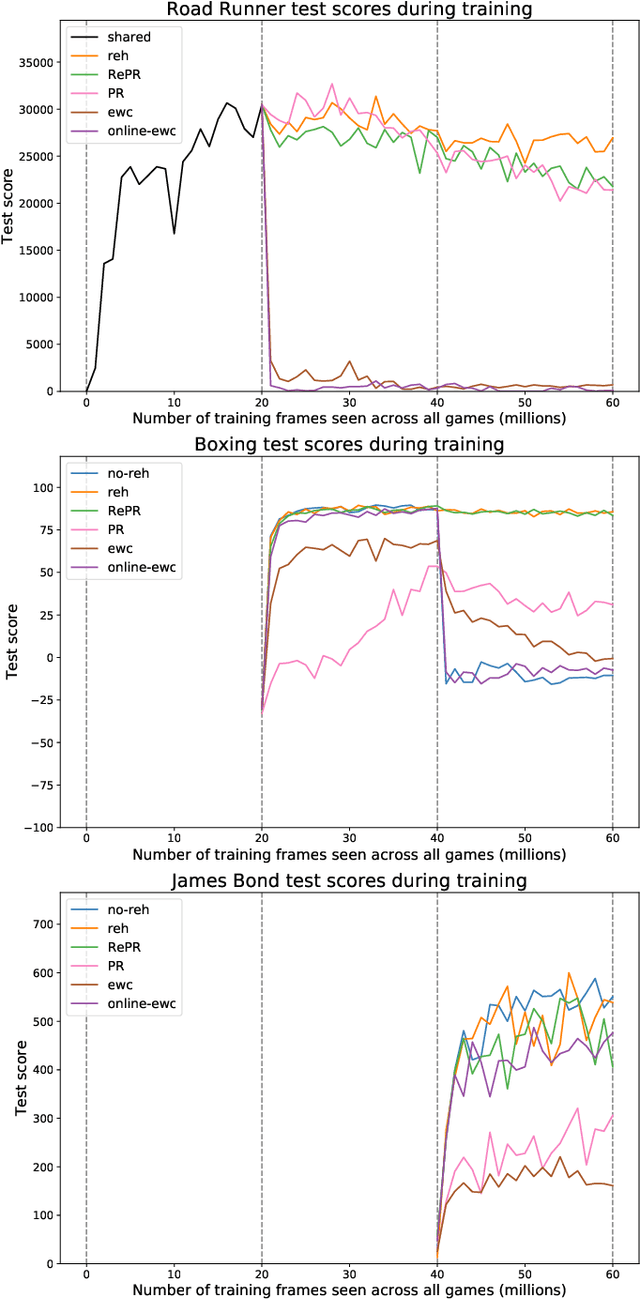
Neural networks can achieve extraordinary results on a wide variety of tasks. However, when they attempt to sequentially learn a number of tasks, they tend to learn the new task while destructively forgetting previous tasks. One solution to this problem is pseudo-rehearsal, which involves learning the new task while rehearsing generated items representative of previous task/s. We demonstrate that pairing pseudo-rehearsal methods with a generative network is an effective solution to this problem in reinforcement learning. Our method iteratively learns three Atari 2600 games while retaining above human level performance on all three games, performing similar to a network which rehearses real examples from all previously learnt tasks.
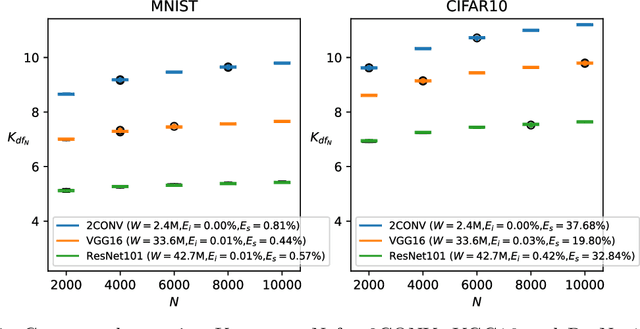
The effect of the choice of neural network depth and breadth on the size of its hypothesis space
Jun 06, 2018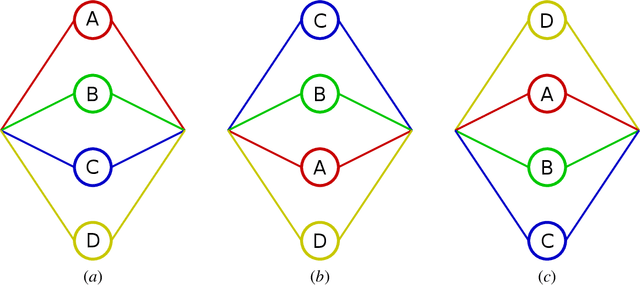
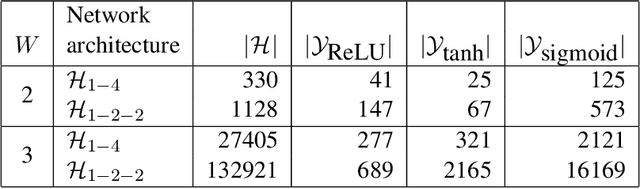
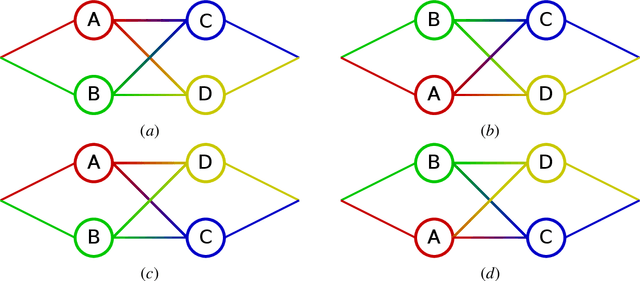
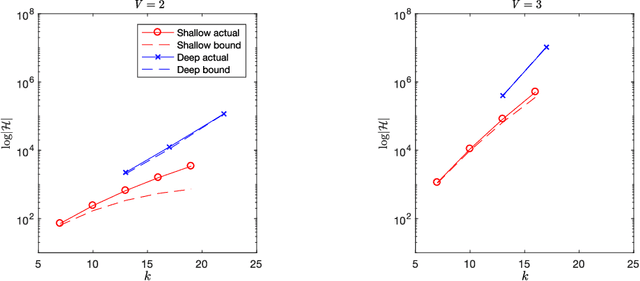
We show that the number of unique function mappings in a neural network hypothesis space is inversely proportional to $\prod_lU_l!$, where $U_{l}$ is the number of neurons in the hidden layer $l$.