 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Trajectory Prediction with Multi-View Data Integration in Cooperative Driving
Aug 02, 2024Current research on trajectory prediction primarily relies on data collected by onboard sensors of an ego vehicle. With the rapid advancement in connected technologies, such as vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, valuable information from alternate views becomes accessible via wireless networks. The integration of information from alternative views has the potential to overcome the inherent limitations associated with a single viewpoint, such as occlusions and limited field of view. In this work, we introduce V2INet, a novel trajectory prediction framework designed to model multi-view data by extending existing single-view models. Unlike previous approaches where the multi-view data is manually fused or formulated as a separate training stage, our model supports end-to-end training, enhancing both flexibility and performance. Moreover, the predicted multimodal trajectories are calibrated by a post-hoc conformal prediction module to get valid and efficient confidence regions. We evaluated the entire framework using the real-world V2I dataset V2X-Seq. Our results demonstrate superior performance in terms of Final Displacement Error (FDE) and Miss Rate (MR) using a single GPU. The code is publicly available at: \url{https://github.com/xichennn/V2I_trajectory_prediction}.
MSMA: Multi-agent Trajectory Prediction in Connected and Autonomous Vehicle Environment with Multi-source Data Integration
Jul 31, 2024The prediction of surrounding vehicle trajectories is crucial for collision-free path planning. In this study, we focus on a scenario where a connected and autonomous vehicle (CAV) serves as the central agent, utilizing both sensors and communication technologies to perceive its surrounding traffics consisting of autonomous vehicles (AVs), connected vehicles (CVs), and human-driven vehicles (HDVs). Our trajectory prediction task is aimed at all the detected surrounding vehicles. To effectively integrate the multi-source data from both sensor and communication technologies, we propose a deep learning framework called MSMA utilizing a cross-attention module for multi-source data fusion. Vector map data is utilized to provide contextual information. The trajectory dataset is collected in CARLA simulator with synthesized data errors introduced. Numerical experiments demonstrate that in a mixed traffic flow scenario, the integration of data from different sources enhances our understanding of the environment. This notably improves trajectory prediction accuracy, particularly in situations with a high CV market penetration rate. The code is available at: https://github.com/xichennn/MSMA.
Network-level Safety Metrics for Overall Traffic Safety Assessment: A Case Study
Jan 27, 2022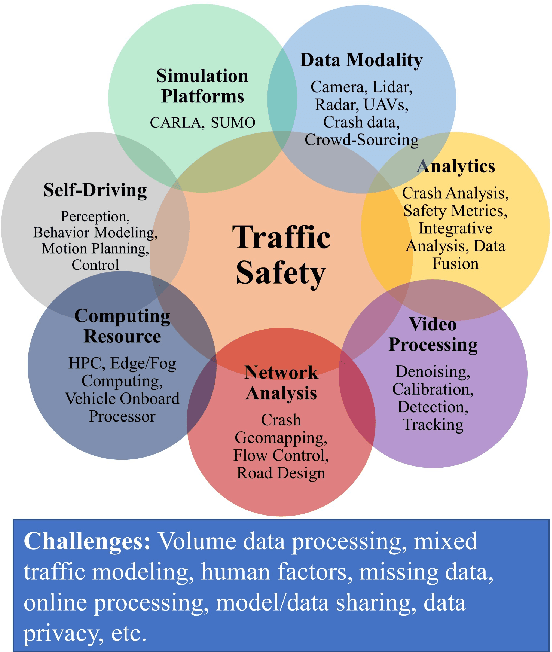
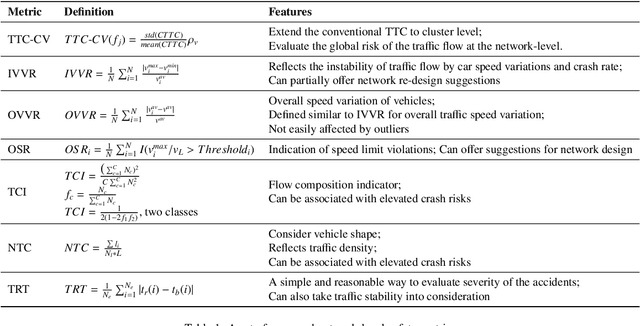
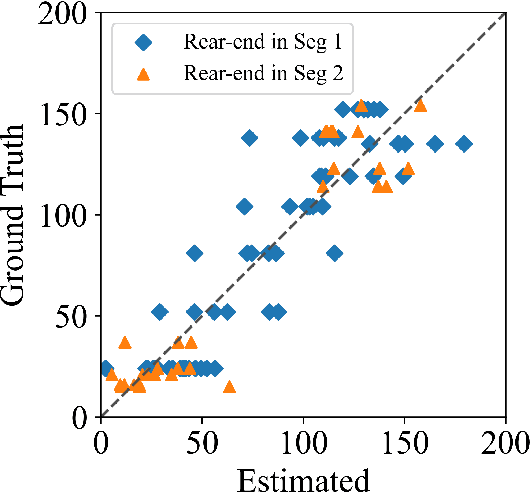
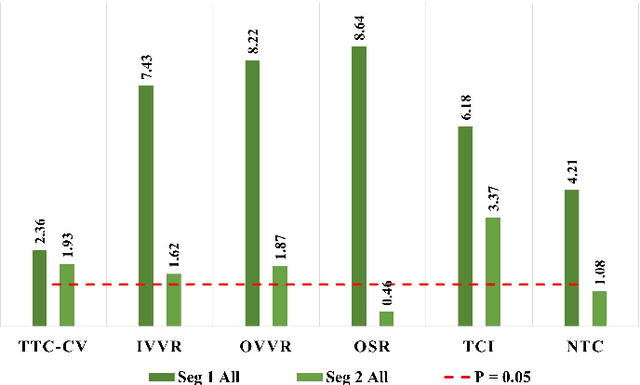
Driving safety analysis has recently witnessed unprecedented results due to advances in computation frameworks, connected vehicle technology, new generation sensors, and artificial intelligence (AI). Particularly, the recent advances performance of deep learning (DL) methods realized higher levels of safety for autonomous vehicles and empowered volume imagery processing for driving safety analysis. An important application of DL methods is extracting driving safety metrics from traffic imagery. However, the majority of current methods use safety metrics for micro-scale analysis of individual crash incidents or near-crash events, which does not provide insightful guidelines for the overall network-level traffic management. On the other hand, large-scale safety assessment efforts mainly emphasize spatial and temporal distributions of crashes, while not always revealing the safety violations that cause crashes. To bridge these two perspectives, we define a new set of network-level safety metrics for the overall safety assessment of traffic flow by processing imagery taken by roadside infrastructure sensors. An integrative analysis of the safety metrics and crash data reveals the insightful temporal and spatial correlation between the representative network-level safety metrics and the crash frequency. The analysis is performed using two video cameras in the state of Arizona along with a 5-year crash report obtained from the Arizona Department of Transportation. The results confirm that network-level safety metrics can be used by the traffic management teams to equip traffic monitoring systems with advanced AI-based risk analysis, and timely traffic flow control decisions.