 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConformal Trajectory Prediction with Multi-View Data Integration in Cooperative Driving
Aug 02, 2024Current research on trajectory prediction primarily relies on data collected by onboard sensors of an ego vehicle. With the rapid advancement in connected technologies, such as vehicle-to-vehicle (V2V) and vehicle-to-infrastructure (V2I) communication, valuable information from alternate views becomes accessible via wireless networks. The integration of information from alternative views has the potential to overcome the inherent limitations associated with a single viewpoint, such as occlusions and limited field of view. In this work, we introduce V2INet, a novel trajectory prediction framework designed to model multi-view data by extending existing single-view models. Unlike previous approaches where the multi-view data is manually fused or formulated as a separate training stage, our model supports end-to-end training, enhancing both flexibility and performance. Moreover, the predicted multimodal trajectories are calibrated by a post-hoc conformal prediction module to get valid and efficient confidence regions. We evaluated the entire framework using the real-world V2I dataset V2X-Seq. Our results demonstrate superior performance in terms of Final Displacement Error (FDE) and Miss Rate (MR) using a single GPU. The code is publicly available at: \url{https://github.com/xichennn/V2I_trajectory_prediction}.
MSMA: Multi-agent Trajectory Prediction in Connected and Autonomous Vehicle Environment with Multi-source Data Integration
Jul 31, 2024The prediction of surrounding vehicle trajectories is crucial for collision-free path planning. In this study, we focus on a scenario where a connected and autonomous vehicle (CAV) serves as the central agent, utilizing both sensors and communication technologies to perceive its surrounding traffics consisting of autonomous vehicles (AVs), connected vehicles (CVs), and human-driven vehicles (HDVs). Our trajectory prediction task is aimed at all the detected surrounding vehicles. To effectively integrate the multi-source data from both sensor and communication technologies, we propose a deep learning framework called MSMA utilizing a cross-attention module for multi-source data fusion. Vector map data is utilized to provide contextual information. The trajectory dataset is collected in CARLA simulator with synthesized data errors introduced. Numerical experiments demonstrate that in a mixed traffic flow scenario, the integration of data from different sources enhances our understanding of the environment. This notably improves trajectory prediction accuracy, particularly in situations with a high CV market penetration rate. The code is available at: https://github.com/xichennn/MSMA.
Prototyping Vehicle Control Applications Using the CAT Vehicle Simulator
Jan 14, 2023



This paper demonstrates the integration model-based design approaches or vehicle control, with validation in a freely available open-source simulator. Continued interest in autonomous vehicles and their deployment is driven by the potential benefits of their use. However, it can be challenging to transition new theoretical approaches into unknown simulation environments. Thus, it is critical for experts from other fields, whose insights may be necessary to continue to advance autonomy, to be able to create control applications with the potential to transition to practice. In this article, we will explain how to use the CAT Vehicle simulator and ROS packages to create and test vehicle controllers. The methodology of developing the control system in this article takes the approach of model-based design using Simulink, and the ROS Toolbox, followed by code generation to create a standalone C++ ROS node. Such ROS nodes can be integrated through roslaunch in the CAT Vehicle ROS package.
Reachability Analysis for FollowerStopper: Safety Analysis and Experimental Results
Dec 29, 2021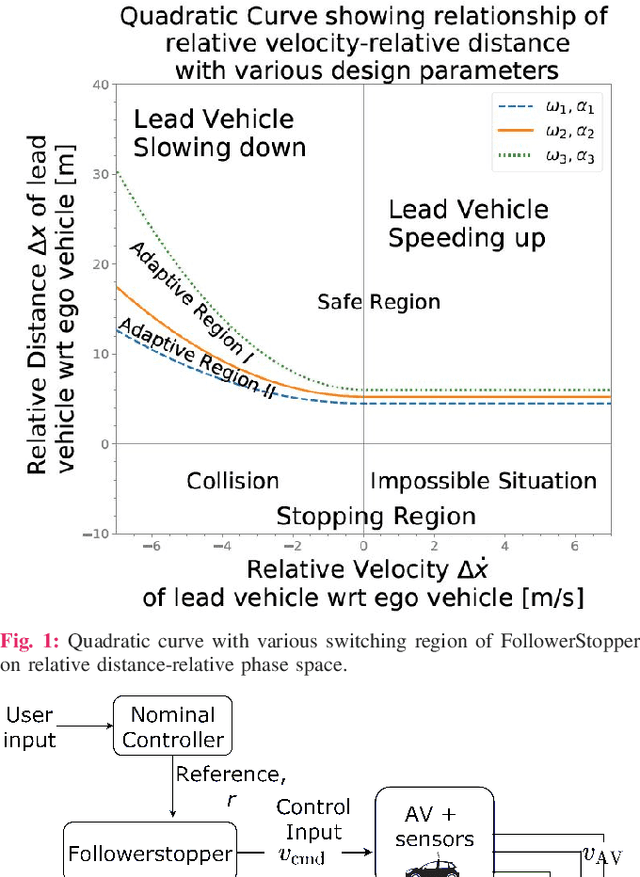
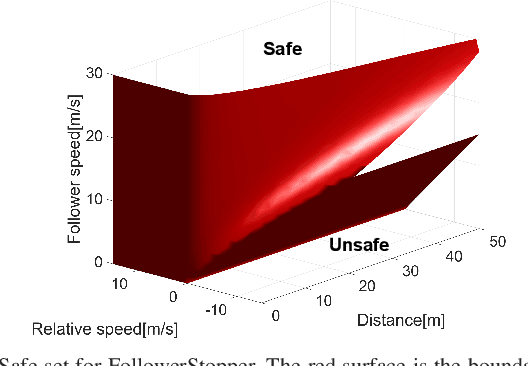
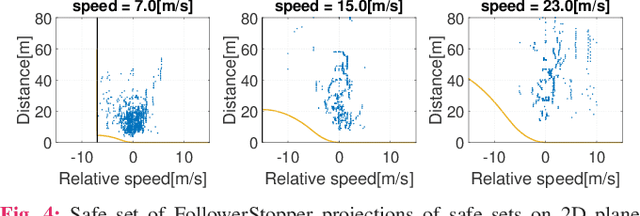
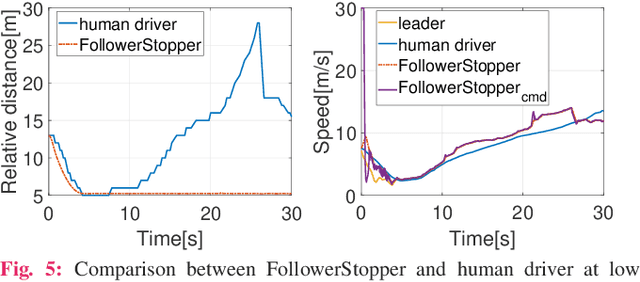
Motivated by earlier work and the developer of a new algorithm, the FollowerStopper, this article uses reachability analysis to verify the safety of the FollowerStopper algorithm, which is a controller designed for dampening stop- and-go traffic waves. With more than 1100 miles of driving data collected by our physical platform, we validate our analysis results by comparing it to human driving behaviors. The FollowerStopper controller has been demonstrated to dampen stop-and-go traffic waves at low speed, but previous analysis on its relative safety has been limited to upper and lower bounds of acceleration. To expand upon previous analysis, reachability analysis is used to investigate the safety at the speeds it was originally tested and also at higher speeds. Two formulations of safety analysis with different criteria are shown: distance-based and time headway-based. The FollowerStopper is considered safe with distance-based criterion. However, simulation results demonstrate that the FollowerStopper is not representative of human drivers - it follows too closely behind vehicles, specifically at a distance human would deem as unsafe. On the other hand, under the time headway-based safety analysis, the FollowerStopper is not considered safe anymore. A modified FollowerStopper is proposed to satisfy time-based safety criterion. Simulation results of the proposed FollowerStopper shows that its response represents human driver behavior better.
AutoEncoder for Interpolation
Jan 06, 2021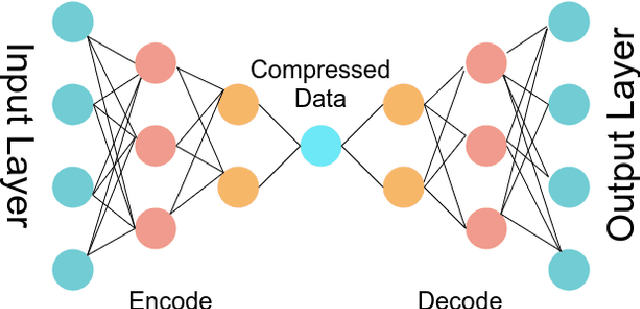
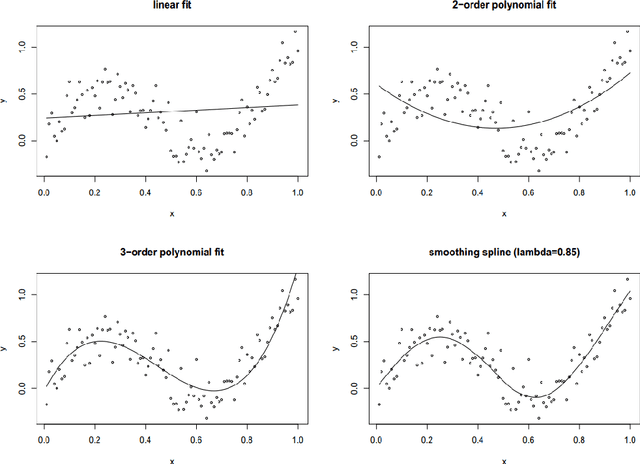


In physical science, sensor data are collected over time to produce timeseries data. However, depending on the real-world condition and underlying physics of the sensor, data might be noisy. Besides, the limitation of sample-time on sensors may not allow collecting data over all the timepoints, may require some form of interpolation. Interpolation may not be smooth enough, fail to denoise data, and derivative operation on noisy sensor data may be poor that do not reveal any high order dynamics. In this article, we propose to use AutoEncoder to perform interpolation that also denoise data simultaneously. A brief example using a real-world is also provided.
Path Planning of Unmanned System using Carrot-chasing Algorithm
Dec 24, 2020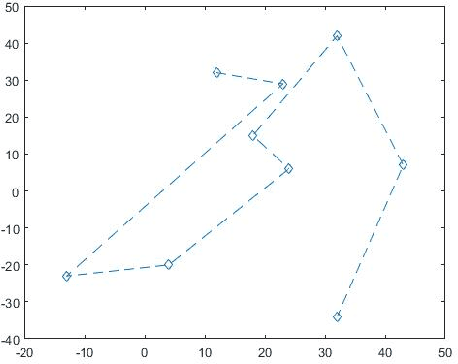

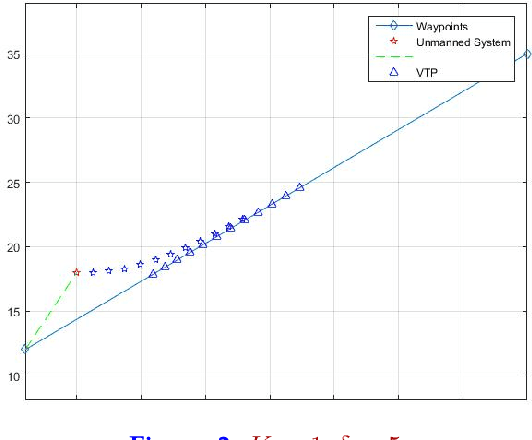
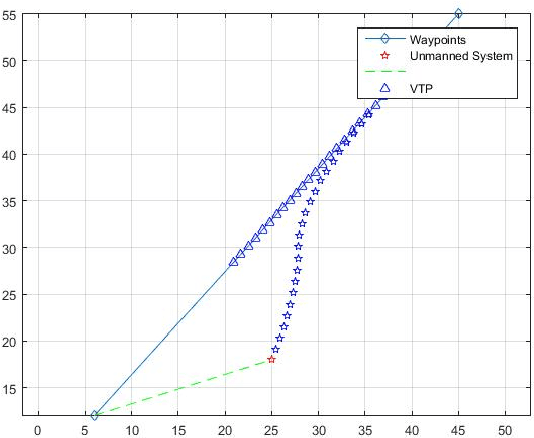
When an unmanned system is launched for a mission-critical task, it is required to follow a predetermined path. It means the unmanned system requires a path following algorithm for the completion of the mission. Since the predetermined path is typically given by a set of data-points, not only the curvature and derivative of the pre-determined path are absent, but also it requires a large size of on-board memory. In this work, we study a simple path following algorithm called Carrot-chasing algorithm that uses a simple controller in the form of a proportional controller to control the movement of an unmanned system.