Get our free extension to see links to code for papers anywhere online!Free add-on: code for papers everywhere!Free add-on: See code for papers anywhere!
 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePath Planning of Unmanned System using Carrot-chasing Algorithm
Paper and Code
Dec 24, 2020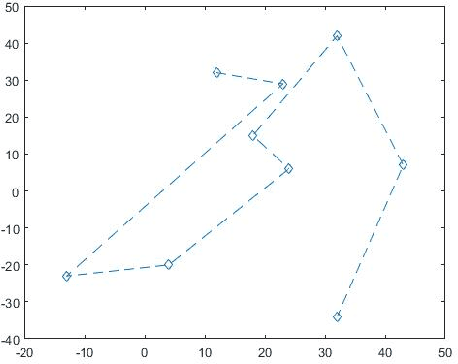

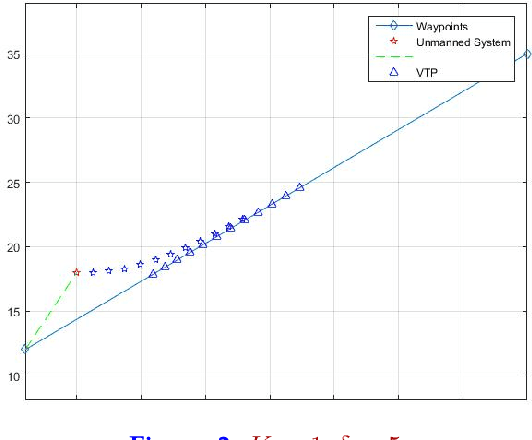
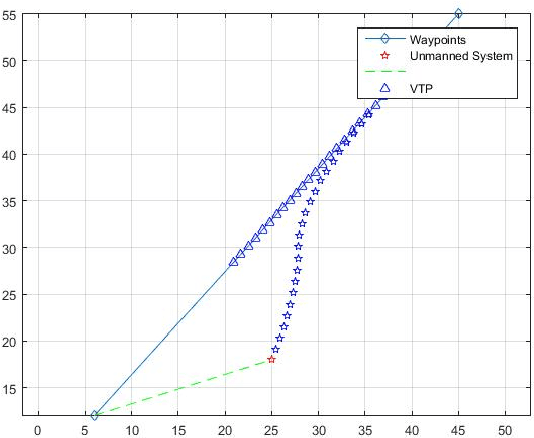
When an unmanned system is launched for a mission-critical task, it is required to follow a predetermined path. It means the unmanned system requires a path following algorithm for the completion of the mission. Since the predetermined path is typically given by a set of data-points, not only the curvature and derivative of the pre-determined path are absent, but also it requires a large size of on-board memory. In this work, we study a simple path following algorithm called Carrot-chasing algorithm that uses a simple controller in the form of a proportional controller to control the movement of an unmanned system.
View paper on