 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGreener Deep Reinforcement Learning: Analysis of Energy and Carbon Efficiency Across Atari Benchmarks
Sep 05, 2025The growing computational demands of deep reinforcement learning (DRL) have raised concerns about the environmental and economic costs of training large-scale models. While algorithmic efficiency in terms of learning performance has been extensively studied, the energy requirements, greenhouse gas emissions, and monetary costs of DRL algorithms remain largely unexplored. In this work, we present a systematic benchmarking study of the energy consumption of seven state-of-the-art DRL algorithms, namely DQN, TRPO, A2C, ARS, PPO, RecurrentPPO, and QR-DQN, implemented using Stable Baselines. Each algorithm was trained for one million steps each on ten Atari 2600 games, and power consumption was measured in real-time to estimate total energy usage, CO2-Equivalent emissions, and electricity cost based on the U.S. national average electricity price. Our results reveal substantial variation in energy efficiency and training cost across algorithms, with some achieving comparable performance while consuming up to 24% less energy (ARS vs. DQN), emitting nearly 68% less CO2, and incurring almost 68% lower monetary cost (QR-DQN vs. RecurrentPPO) than less efficient counterparts. We further analyze the trade-offs between learning performance, training time, energy use, and financial cost, highlighting cases where algorithmic choices can mitigate environmental and economic impact without sacrificing learning performance. This study provides actionable insights for developing energy-aware and cost-efficient DRL practices and establishes a foundation for incorporating sustainability considerations into future algorithmic design and evaluation.
TrojPrompt: A Black-box Trojan Attack on Pre-trained Language Models
Jun 12, 2023



Prompt learning has been proven to be highly effective in improving pre-trained language model (PLM) adaptability, surpassing conventional fine-tuning paradigms, and showing exceptional promise in an ever-growing landscape of applications and APIs tailored for few-shot learning scenarios. Despite the growing prominence of prompt learning-based APIs, their security concerns remain underexplored. In this paper, we undertake a pioneering study on the Trojan susceptibility of prompt-learning PLM APIs. We identified several key challenges, including discrete-prompt, few-shot, and black-box settings, which limit the applicability of existing backdoor attacks. To address these challenges, we propose TrojPrompt, an automatic and black-box framework to effectively generate universal and stealthy triggers and insert Trojans into hard prompts. Specifically, we propose a universal API-driven trigger discovery algorithm for generating universal triggers for various inputs by querying victim PLM APIs using few-shot data samples. Furthermore, we introduce a novel progressive trojan poisoning algorithm designed to generate poisoned prompts that retain efficacy and transferability across a diverse range of models. Our experiments and results demonstrate TrojPrompt's capacity to effectively insert Trojans into text prompts in real-world black-box PLM APIs, while maintaining exceptional performance on clean test sets and significantly outperforming baseline models. Our work sheds light on the potential security risks in current models and offers a potential defensive approach.
Internet of Things Applications: Animal Monitoring with Unmanned Aerial Vehicle
Oct 20, 2016
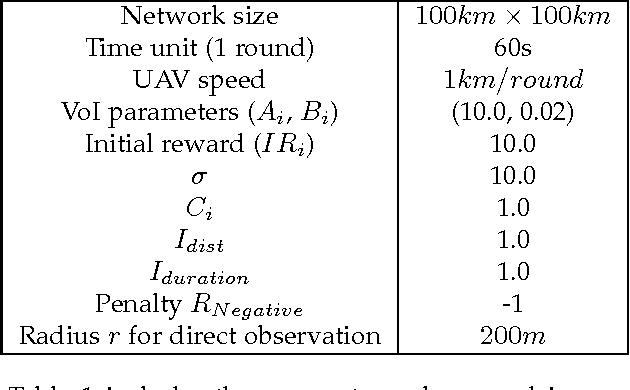

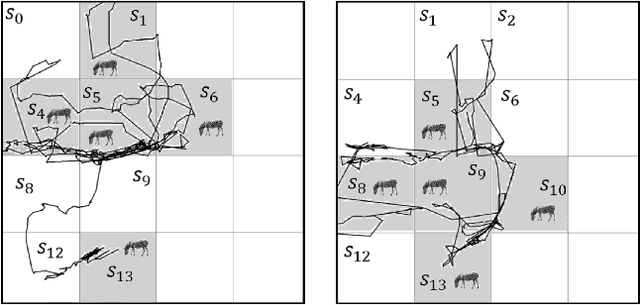
In animal monitoring applications, both animal detection and their movement prediction are major tasks. While a variety of animal monitoring strategies exist, most of them rely on mounting devices. However, in real world, it is difficult to find these animals and install mounting devices. In this paper, we propose an animal monitoring application by utilizing wireless sensor networks (WSNs) and unmanned aerial vehicle (UAV). The objective of the application is to detect locations of endangered species in large-scale wildlife areas and monitor movement of animals without any attached devices. In this application, sensors deployed throughout the observation area are responsible for gathering animal information. The UAV flies above the observation area and collects the information from sensors. To achieve the information efficiently, we propose a path planning approach for the UAV based on a Markov decision process (MDP) model. The UAV receives a certain amount of reward from an area if some animals are detected at that location. We solve the MDP using Q-learning such that the UAV prefers going to those areas that animals are detected before. Meanwhile, the UAV explores other areas as well to cover the entire network and detects changes in the animal positions. We first define the mathematical model underlying the animal monitoring problem in terms of the value of information (VoI) and rewards. We propose a network model including clusters of sensor nodes and a single UAV that acts as a mobile sink and visits the clusters. Then, one MDP-based path planning approach is designed to maximize the VoI while reducing message delays. The effectiveness of the proposed approach is evaluated using two real-world movement datasets of zebras and leopard. Simulation results show that our approach outperforms greedy, random heuristics and the path planning based on the traveling salesman problem.
Agent-based modeling of a price information trading business
Mar 29, 2013
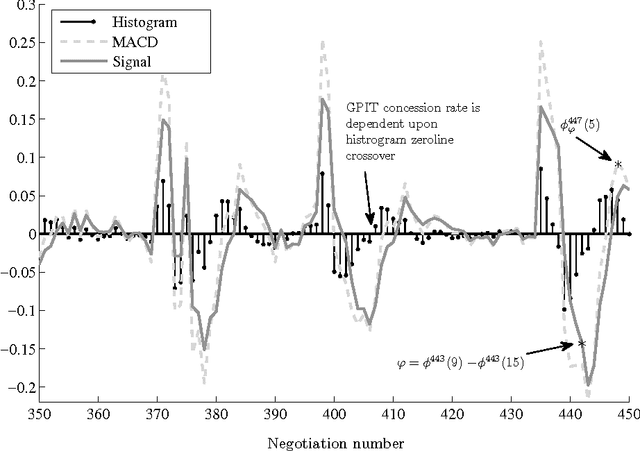
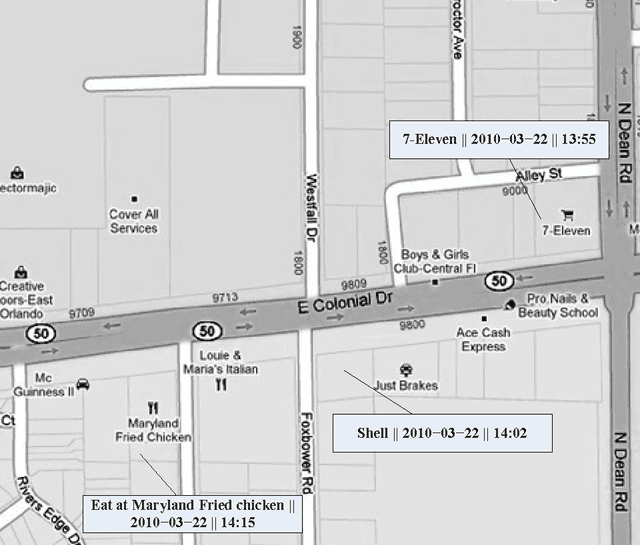
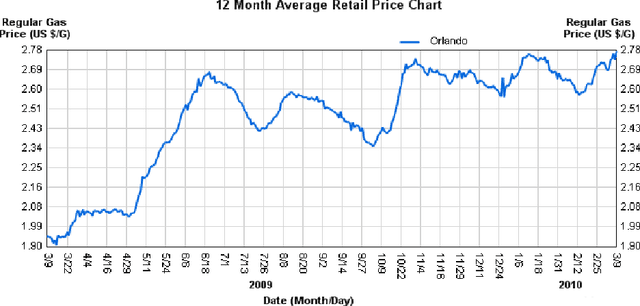
We describe an agent-based simulation of a fictional (but feasible) information trading business. The Gas Price Information Trader (GPIT) buys information about real-time gas prices in a metropolitan area from drivers and resells the information to drivers who need to refuel their vehicles. Our simulation uses real world geographic data, lifestyle-dependent driving patterns and vehicle models to create an agent-based model of the drivers. We use real world statistics of gas price fluctuation to create scenarios of temporal and spatial distribution of gas prices. The price of the information is determined on a case-by-case basis through a simple negotiation model. The trader and the customers are adapting their negotiation strategies based on their historical profits. We are interested in the general properties of the emerging information market: the amount of realizable profit and its distribution between the trader and customers, the business strategies necessary to keep the market operational (such as promotional deals), the price elasticity of demand and the impact of pricing strategies on the profit.
Shadows and Headless Shadows: an Autobiographical Approach to Narrative Reasoning
Nov 24, 2012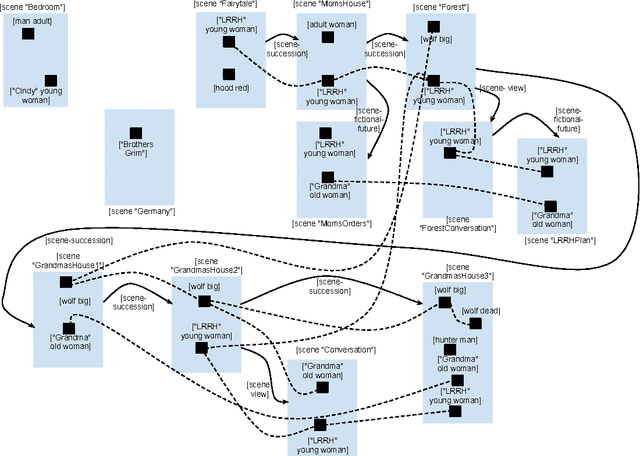
The Xapagy architecture is a story-oriented cognitive system which relies exclusively on the autobiographical memory implemented as a raw collection of events. Reasoning is performed by shadowing current events with events from the autobiography. The shadows are then extrapolated into headless shadows (HLSs). In a story following mood, HLSs can be used to track the level of surprise of the agent, to infer hidden actions or relations between the participants, and to summarize ongoing events. In recall mood, the HLSs can be used to create new stories ranging from exact recall to free-form confabulation.
Modeling problems of identity in Little Red Riding Hood
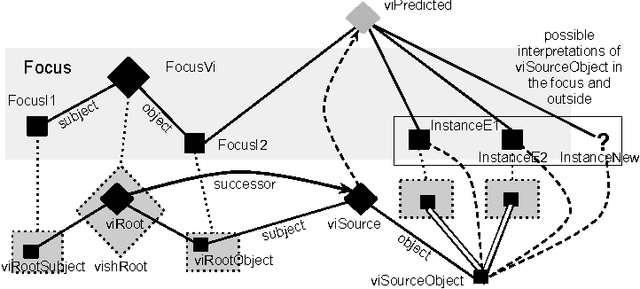
Nov 24, 2012This paper argues that the problem of identity is a critical challenge in agents which are able to reason about stories. The Xapagy architecture has been built from scratch to perform narrative reasoning and relies on a somewhat unusual approach to represent instances and identity. We illustrate the approach by a representation of the story of Little Red Riding Hood in the architecture, with a focus on the problem of identity raised by the narrative.
Shadows and headless shadows: a worlds-based, autobiographical approach to reasoning
Nov 24, 2012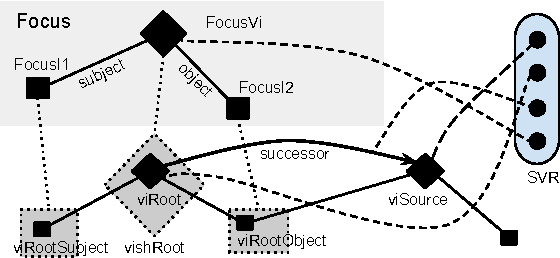
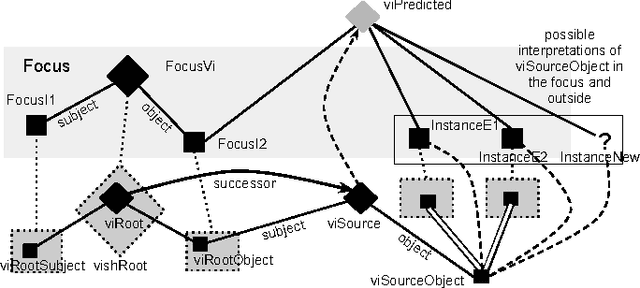
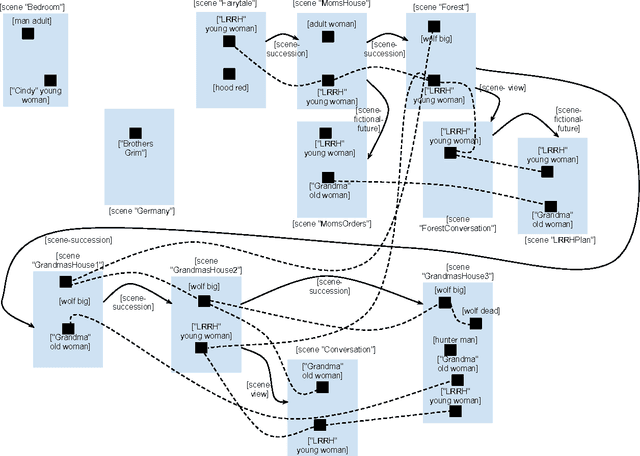
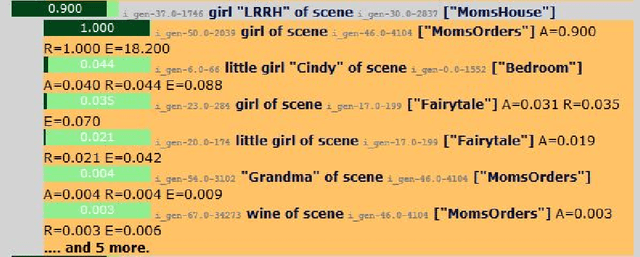
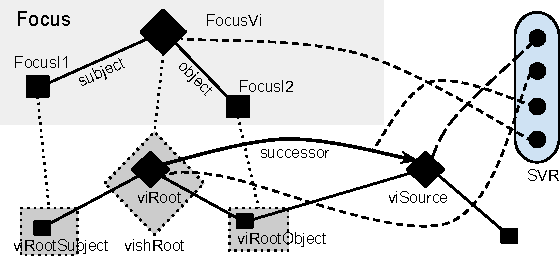
Many cognitive systems deploy multiple, closed, individually consistent models which can represent interpretations of the present state of the world, moments in the past, possible futures or alternate versions of reality. While they appear under different names, these structures can be grouped under the general term of worlds. The Xapagy architecture is a story-oriented cognitive system which relies exclusively on the autobiographical memory implemented as a raw collection of events organized into world-type structures called {\em scenes}. The system performs reasoning by shadowing current events with events from the autobiography. The shadows are then extrapolated into headless shadows corresponding to predictions, hidden events or inferred relations.