 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeStudy of Robust Direction Finding Based on Joint Sparse Representation
May 27, 2024Standard Direction of Arrival (DOA) estimation methods are typically derived based on the Gaussian noise assumption, making them highly sensitive to outliers. Therefore, in the presence of impulsive noise, the performance of these methods may significantly deteriorate. In this paper, we model impulsive noise as Gaussian noise mixed with sparse outliers. By exploiting their statistical differences, we propose a novel DOA estimation method based on sparse signal recovery (SSR). Furthermore, to address the issue of grid mismatch, we utilize an alternating optimization approach that relies on the estimated outlier matrix and the on-grid DOA estimates to obtain the off-grid DOA estimates. Simulation results demonstrate that the proposed method exhibits robustness against large outliers.
Automatic Velocity Picking Using a Multi-Information Fusion Deep Semantic Segmentation Network
May 07, 2022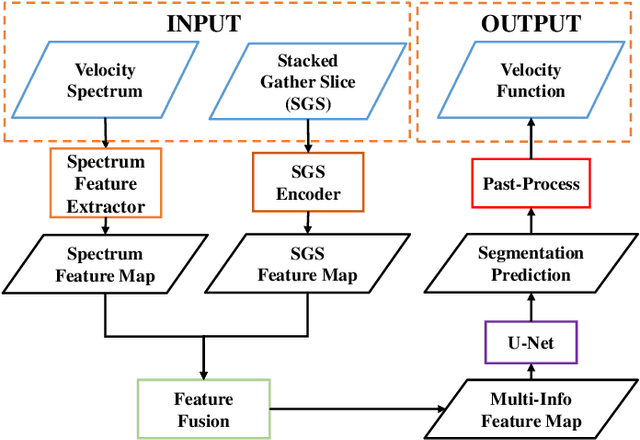
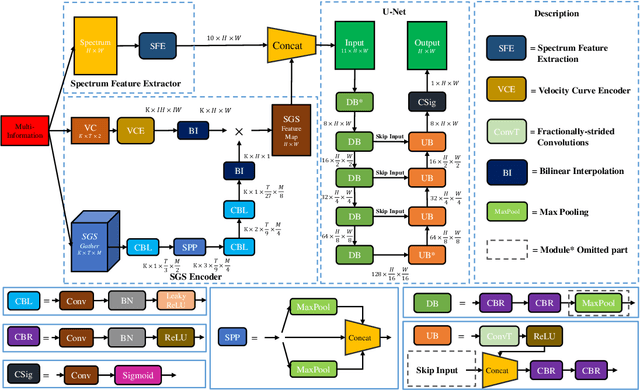
Velocity picking, a critical step in seismic data processing, has been studied for decades. Although manual picking can produce accurate normal moveout (NMO) velocities from the velocity spectra of prestack gathers, it is time-consuming and becomes infeasible with the emergence of large amount of seismic data. Numerous automatic velocity picking methods have thus been developed. In recent years, deep learning (DL) methods have produced good results on the seismic data with medium and high signal-to-noise ratios (SNR). Unfortunately, it still lacks a picking method to automatically generate accurate velocities in the situations of low SNR. In this paper, we propose a multi-information fusion network (MIFN) to estimate stacking velocity from the fusion information of velocity spectra and stack gather segments (SGS). In particular, we transform the velocity picking problem into a semantic segmentation problem based on the velocity spectrum images. Meanwhile, the information provided by SGS is used as a prior in the network to assist segmentation. The experimental results on two field datasets show that the picking results of MIFN are stable and accurate for the scenarios with medium and high SNR, and it also performs well in low SNR scenarios.
Autonomous Driving at Intersections: A Critical-Turning-Point Approach for Left Turns
Mar 05, 2020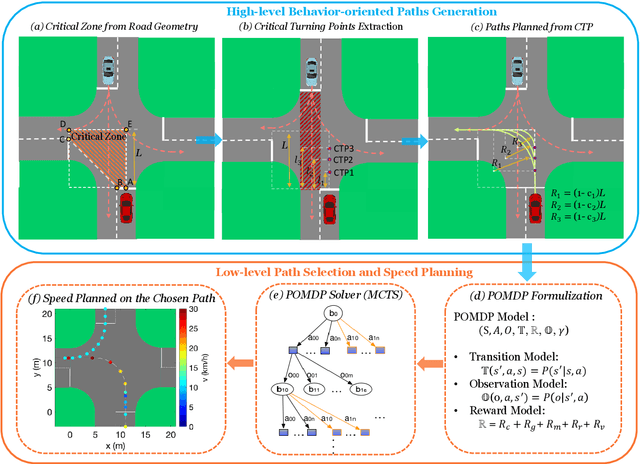
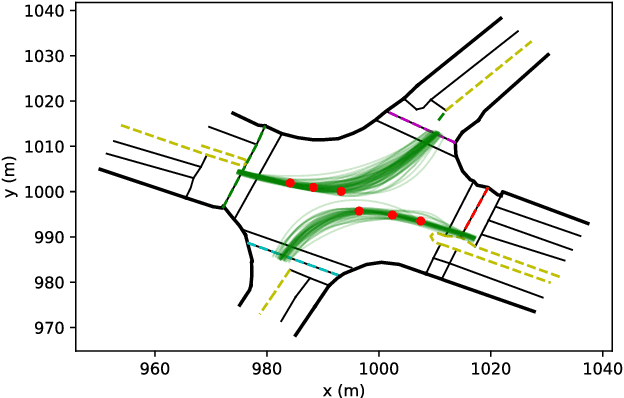

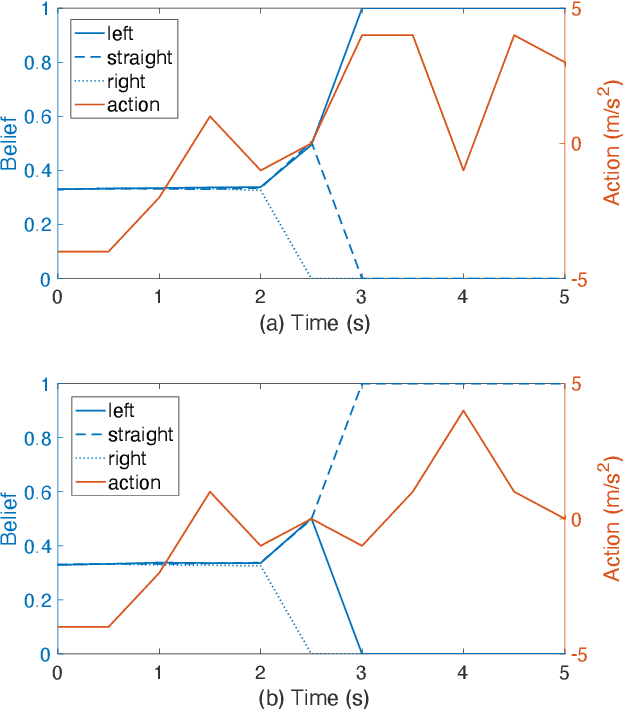
Left-turn planning is one of the formidable challenges for autonomous vehicles, especially at unsignalized intersections due to the unknown intentions of oncoming vehicles. This paper addresses the challenge by proposing a critical turning point (CTP) based hierarchical planning approach. This includes a high-level candidate path generator and a low-level partially observable Markov decision process (POMDP) based planner. The proposed (CTP) concept, inspired by human-driving behaviors at intersections, aims to increase the computational efficiency of the low-level planner and to enable human-friendly autonomous driving. The POMDP based low-level planner takes unknown intentions of oncoming vehicles into considerations to perform less conservative yet safe actions. With proper integration, the proposed hierarchical approach is capable of achieving safe planning results with high commute efficiency at unsignalized intersections in real time.
Generative adversarial networks for generation and classification of physical rehabilitation movement episodes
Dec 15, 2018
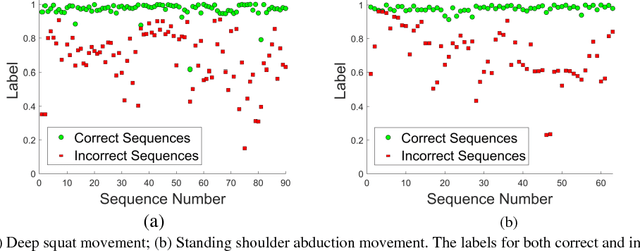
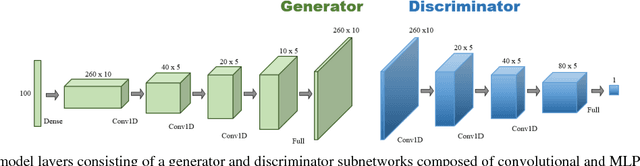

This article proposes a method for mathematical modeling of human movements related to patient exercise episodes performed during physical therapy sessions by using artificial neural networks. The generative adversarial network structure is adopted, whereby a discriminative and a generative model are trained concurrently in an adversarial manner. Different network architectures are examined, with the discriminative and generative models structured as deep subnetworks of hidden layers comprised of convolutional or recurrent computational units. The models are validated on a data set of human movements recorded with an optical motion tracker. The results demonstrate an ability of the networks for classification of new instances of motions, and for generation of motion examples that resemble the recorded motion sequences.
* 11 pages, 6 figures
Engineering a Conformant Probabilistic Planner
Sep 26, 2011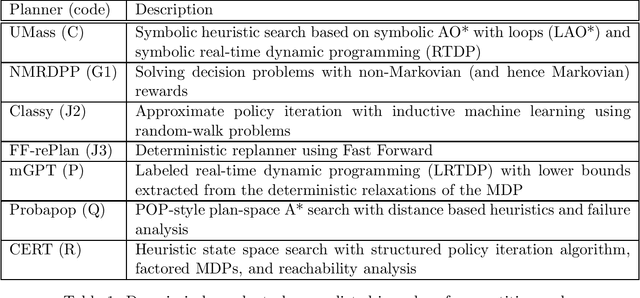
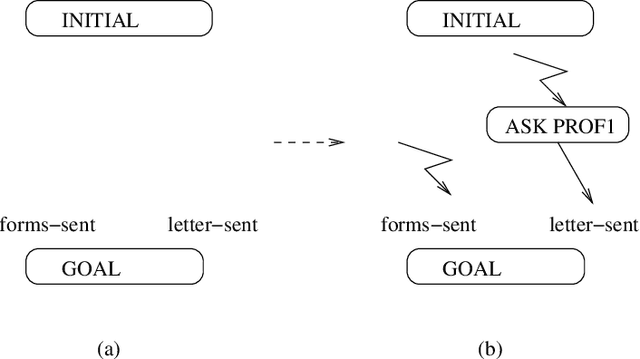

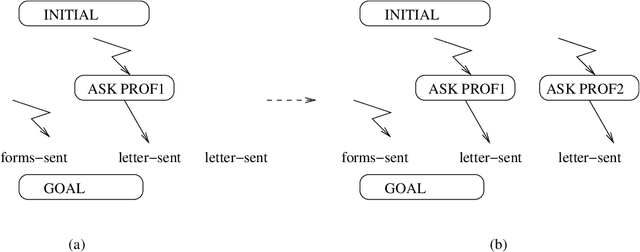
We present a partial-order, conformant, probabilistic planner, Probapop which competed in the blind track of the Probabilistic Planning Competition in IPC-4. We explain how we adapt distance based heuristics for use with probabilistic domains. Probapop also incorporates heuristics based on probability of success. We explain the successes and difficulties encountered during the design and implementation of Probapop.