 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Diffractometry Enabled by Visual Reinforcement Learning
Apr 13, 2026Automation underpins progress across scientific and industrial disciplines. Yet, automating tasks requiring interpretation of abstract visual information remain challenging. For example, crystal alignment strongly relies on humans with the ability to comprehend diffraction patterns. Here we introduce an autonomous system that aligns single crystals without access to crystallography and diffraction theory. Using a model-free reinforcement learning framework, an agent learns to identify and navigate towards high-symmetry orientations directly from Laue diffraction patterns. Despite the absence of human supervision, the agent develops human-like strategies to achieve time-efficient alignment across different crystal symmetry classes. With this, we provide a computational framework for intelligent diffractometers. As such, our approach advances the development of automated experimental workflows in materials science.
AI-assisted Optimization of the ECCE Tracking System at the Electron Ion Collider
May 20, 2022The Electron-Ion Collider (EIC) is a cutting-edge accelerator facility that will study the nature of the "glue" that binds the building blocks of the visible matter in the universe. The proposed experiment will be realized at Brookhaven National Laboratory in approximately 10 years from now, with detector design and R&D currently ongoing. Notably, EIC is one of the first large-scale facilities to leverage Artificial Intelligence (AI) already starting from the design and R&D phases. The EIC Comprehensive Chromodynamics Experiment (ECCE) is a consortium that proposed a detector design based on a 1.5T solenoid. The EIC detector proposal review concluded that the ECCE design will serve as the reference design for an EIC detector. Herein we describe a comprehensive optimization of the ECCE tracker using AI. The work required a complex parametrization of the simulated detector system. Our approach dealt with an optimization problem in a multidimensional design space driven by multiple objectives that encode the detector performance, while satisfying several mechanical constraints. We describe our strategy and show results obtained for the ECCE tracking system. The AI-assisted design is agnostic to the simulation framework and can be extended to other sub-detectors or to a system of sub-detectors to further optimize the performance of the EIC detector.
Autonomous Driving at Intersections: A Critical-Turning-Point Approach for Left Turns
Mar 05, 2020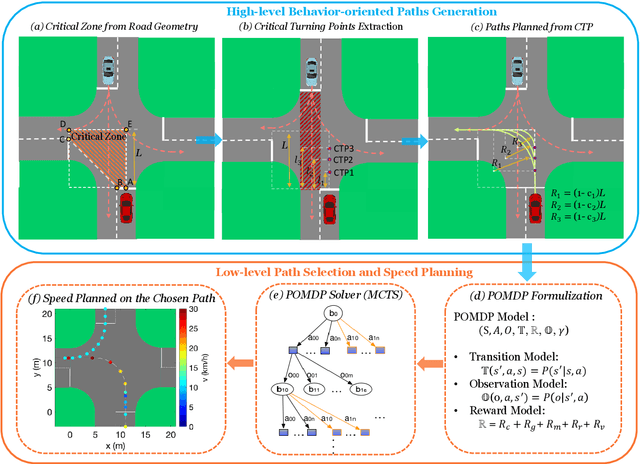

Left-turn planning is one of the formidable challenges for autonomous vehicles, especially at unsignalized intersections due to the unknown intentions of oncoming vehicles. This paper addresses the challenge by proposing a critical turning point (CTP) based hierarchical planning approach. This includes a high-level candidate path generator and a low-level partially observable Markov decision process (POMDP) based planner. The proposed (CTP) concept, inspired by human-driving behaviors at intersections, aims to increase the computational efficiency of the low-level planner and to enable human-friendly autonomous driving. The POMDP based low-level planner takes unknown intentions of oncoming vehicles into considerations to perform less conservative yet safe actions. With proper integration, the proposed hierarchical approach is capable of achieving safe planning results with high commute efficiency at unsignalized intersections in real time.