 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMulti-Modal Learning Using Physicians Diagnostics for Optical Coherence Tomography Classification
Mar 20, 2022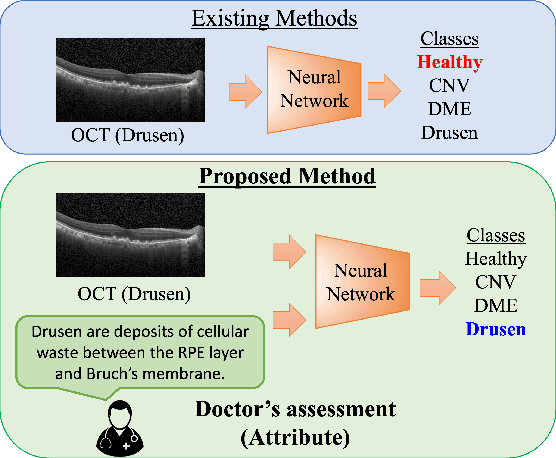
In this paper, we propose a framework that incorporates experts diagnostics and insights into the analysis of Optical Coherence Tomography (OCT) using multi-modal learning. To demonstrate the effectiveness of this approach, we create a medical diagnostic attribute dataset to improve disease classification using OCT. Although there have been successful attempts to deploy machine learning for disease classification in OCT, such methodologies lack the experts insights. We argue that injecting ophthalmological assessments as another supervision in a learning framework is of great importance for the machine learning process to perform accurate and interpretable classification. We demonstrate the proposed framework through comprehensive experiments that compare the effectiveness of combining diagnostic attribute features with latent visual representations and show that they surpass the state-of-the-art approach. Finally, we analyze the proposed dual-stream architecture and provide an insight that determine the components that contribute most to classification performance.
RIS-aided Zero-Forcing and Regularized Zero-Forcing Beamforming in Integrated Information and Energy Delivery
Jan 08, 2022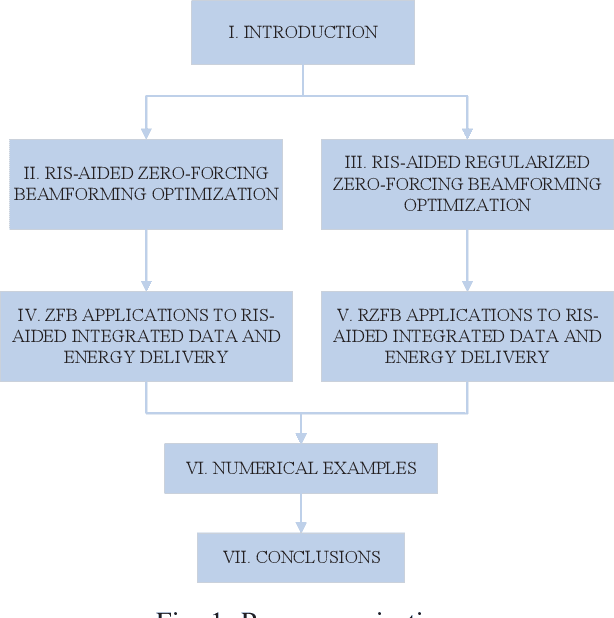
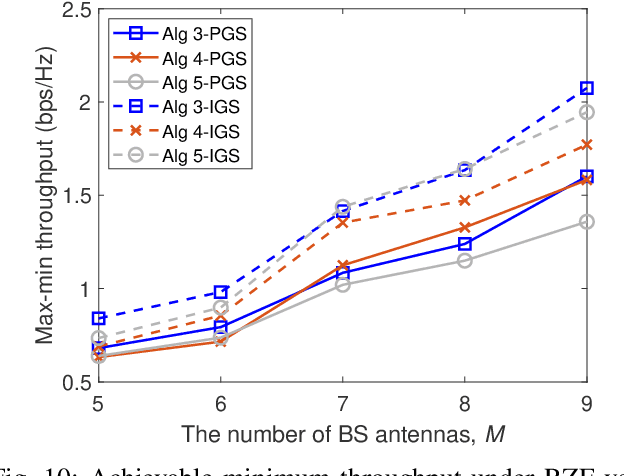
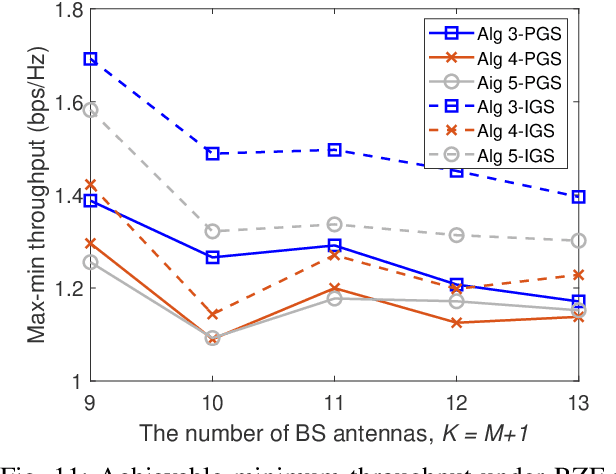
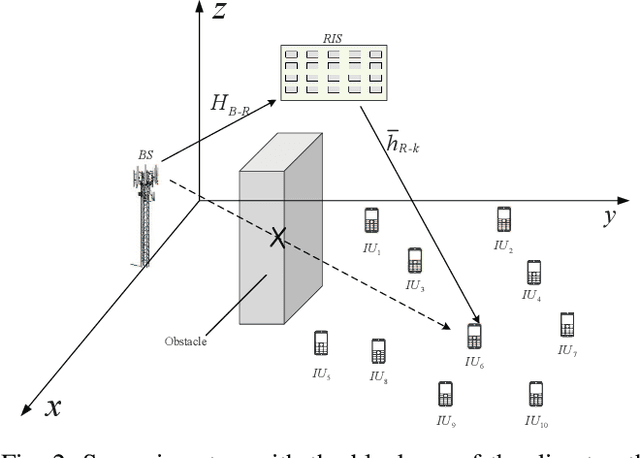
This paper considers a network of a multi-antenna array base station (BS) and a reconfigurable intelligent surface (RIS) to deliver both information to information users (IUs) and power to energy users (EUs). The RIS links the connection between the IUs and the BS as there is no direct path between the former and the latter. The EUs are located nearby the BS in order to effectively harvest energy from the high-power signal from the BS, while the much weaker signal reflected from the RIS hardly contributes to the EUs' harvested energy. To provide reliable links for all users over the same time-slot, we adopt the transmit time-switching (transmit-TS) approach, under which information and energy are delivered over different time-slot fractions. This allows us to rely on conjugate beamforming for energy links and zero-forcing/regularized zero-forcing beamforming (ZFB/RZFB) and on the programmable reflecting coefficients (PRCs) of the RIS for information links. We show that ZFB/RZFB and PRCs can be still separately optimized in their joint design, where PRC optimization is based on iterative closed-form expressions. We then develop a path-following algorithm for solving our max-min IU throughput optimization problem subject to a realistic constraint on the quality-of-energy-service in terms of the EUs' harvested energy thresholds. We also propose a new RZFB for substantially improving the IUs' throughput.
Financial Crime & Fraud Detection Using Graph Computing: Application Considerations & Outlook
Mar 02, 2021In recent years, the unprecedented growth in digital payments fueled consequential changes in fraud and financial crimes. In this new landscape, traditional fraud detection approaches such as rule-based engines have largely become ineffective. AI and machine learning solutions using graph computing principles have gained significant interest. Graph neural networks and emerging adaptive solutions provide compelling opportunities for the future of fraud and financial crime detection. However, implementing the graph-based solutions in financial transaction processing systems has brought numerous obstacles and application considerations to light. In this paper, we overview the latest trends in the financial crimes landscape and discuss the implementation difficulties current and emerging graph solutions face. We argue that the application demands and implementation challenges provide key insights in developing effective solutions.
Autonomous Driving at Intersections: A Critical-Turning-Point Approach for Left Turns
Mar 05, 2020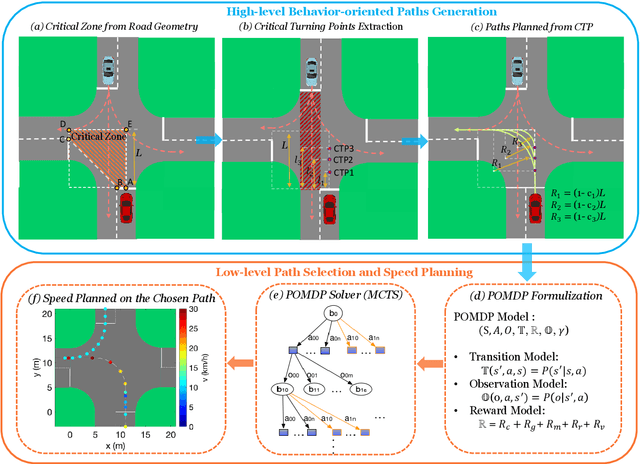
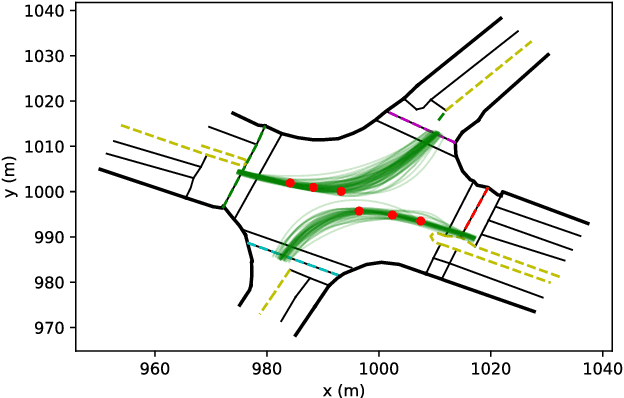

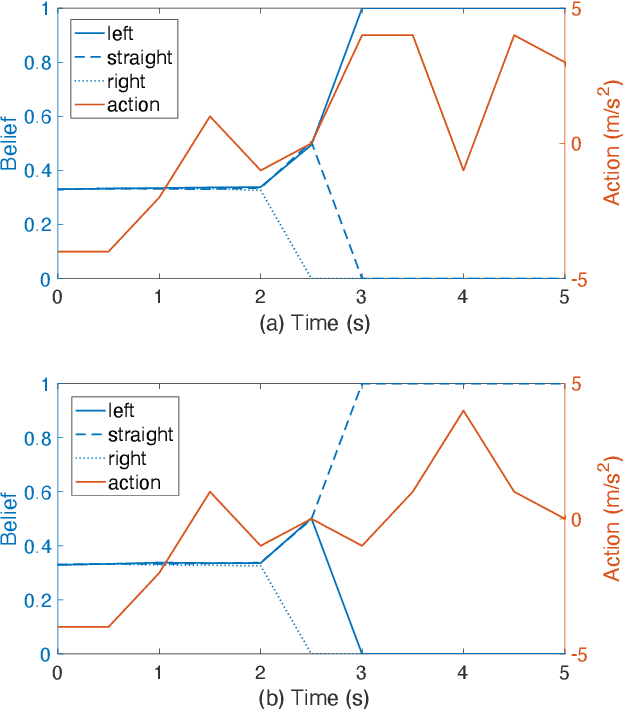
Left-turn planning is one of the formidable challenges for autonomous vehicles, especially at unsignalized intersections due to the unknown intentions of oncoming vehicles. This paper addresses the challenge by proposing a critical turning point (CTP) based hierarchical planning approach. This includes a high-level candidate path generator and a low-level partially observable Markov decision process (POMDP) based planner. The proposed (CTP) concept, inspired by human-driving behaviors at intersections, aims to increase the computational efficiency of the low-level planner and to enable human-friendly autonomous driving. The POMDP based low-level planner takes unknown intentions of oncoming vehicles into considerations to perform less conservative yet safe actions. With proper integration, the proposed hierarchical approach is capable of achieving safe planning results with high commute efficiency at unsignalized intersections in real time.