 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAutonomous Driving at Intersections: A Critical-Turning-Point Approach for Left Turns
Paper and Code
Mar 05, 2020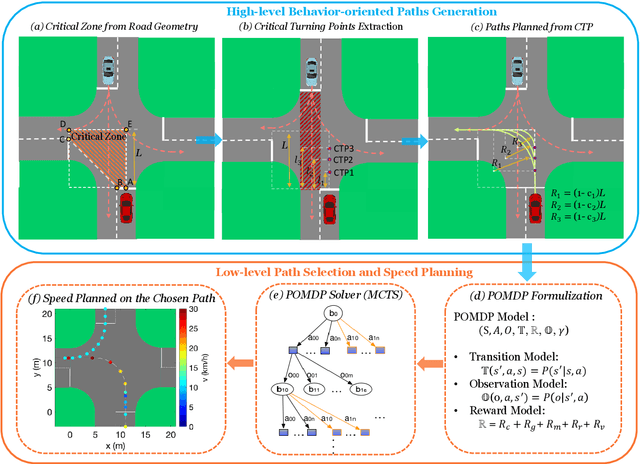

Left-turn planning is one of the formidable challenges for autonomous vehicles, especially at unsignalized intersections due to the unknown intentions of oncoming vehicles. This paper addresses the challenge by proposing a critical turning point (CTP) based hierarchical planning approach. This includes a high-level candidate path generator and a low-level partially observable Markov decision process (POMDP) based planner. The proposed (CTP) concept, inspired by human-driving behaviors at intersections, aims to increase the computational efficiency of the low-level planner and to enable human-friendly autonomous driving. The POMDP based low-level planner takes unknown intentions of oncoming vehicles into considerations to perform less conservative yet safe actions. With proper integration, the proposed hierarchical approach is capable of achieving safe planning results with high commute efficiency at unsignalized intersections in real time.