 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeModel Predictive Path Integral PID Control for Learning-Based Path Following
Mar 31, 2026Classical proportional--integral--derivative (PID) control is widely employed in industrial applications; however, achieving higher performance often motivates the adoption of model predictive control (MPC). Although gradient-based methods are the standard for real-time optimization, sampling-based approaches have recently gained attention. In particular, model predictive path integral (MPPI) control enables gradient-free optimization and accommodates non-differentiable models and objective functions. However, directly sampling control input sequences may yield discontinuous inputs and increase the optimization dimensionality in proportion to the prediction horizon. This study proposes MPPI--PID control, which applies MPPI to optimize PID gains at each control step, thereby replacing direct high-dimensional input-sequence optimization with low-dimensional gain-space optimization. This formulation enhances sample efficiency and yields smoother inputs via the PID structure. We also provide theoretical insights, including an information-theoretic interpretation that unifies MPPI and MPPI--PID, an analysis of the effect of optimization dimensionality on sample efficiency, and a characterization of input continuity induced by the PID structure. The proposed method is evaluated on the learning-based path following of a mini forklift using a residual-learning dynamics model that integrates a physical model with a neural network. System identification is performed with real driving data. Numerical path-following experiments demonstrate that MPPI--PID improves tracking performance compared with fixed-gain PID and achieves performance comparable to conventional MPPI while significantly reducing input increments. Furthermore, the proposed method maintains favorable performance even with substantially fewer samples, demonstrating its improved sample efficiency.
Visual-Based Forklift Learning System Enabling Zero-Shot Sim2Real Without Real-World Data
Dec 16, 2024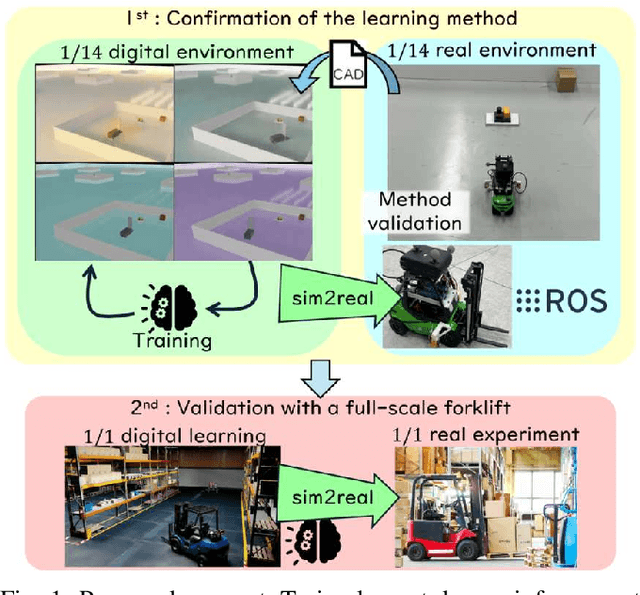
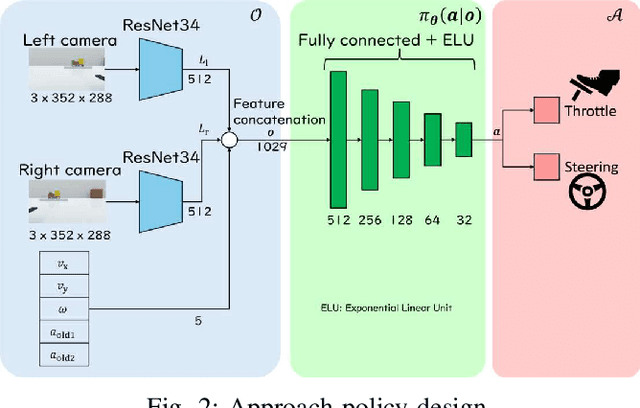
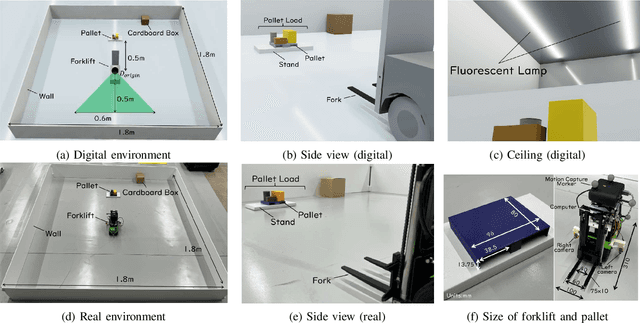
Forklifts are used extensively in various industrial settings and are in high demand for automation. In particular, counterbalance forklifts are highly versatile and employed in diverse scenarios. However, efforts to automate these processes are lacking, primarily owing to the absence of a safe and performance-verifiable development environment. This study proposes a learning system that combines a photorealistic digital learning environment with a 1/14-scale robotic forklift environment to address this challenge. Inspired by the training-based learning approach adopted by forklift operators, we employ an end-to-end vision-based deep reinforcement learning approach. The learning is conducted in a digitalized environment created from CAD data, making it safe and eliminating the need for real-world data. In addition, we safely validate the method in a physical setting utilizing a 1/14-scale robotic forklift with a configuration similar to that of a real forklift. We achieved a 60% success rate in pallet loading tasks in real experiments using a robotic forklift. Our approach demonstrates zero-shot sim2real with a simple method that does not require heuristic additions. This learning-based approach is considered a first step towards the automation of counterbalance forklifts.
Tsallis Entropy Regularization for Linearly Solvable MDP and Linear Quadratic Regulator
Mar 04, 2024Shannon entropy regularization is widely adopted in optimal control due to its ability to promote exploration and enhance robustness, e.g., maximum entropy reinforcement learning known as Soft Actor-Critic. In this paper, Tsallis entropy, which is a one-parameter extension of Shannon entropy, is used for the regularization of linearly solvable MDP and linear quadratic regulators. We derive the solution for these problems and demonstrate its usefulness in balancing between exploration and sparsity of the obtained control law.
Imitation-regularized Optimal Transport on Networks: Provable Robustness and Application to Logistics Planning
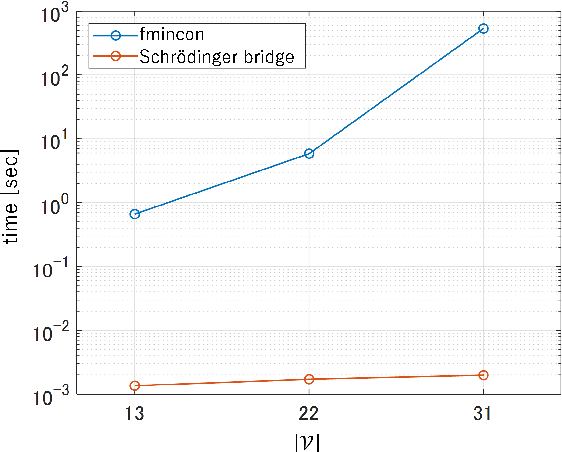
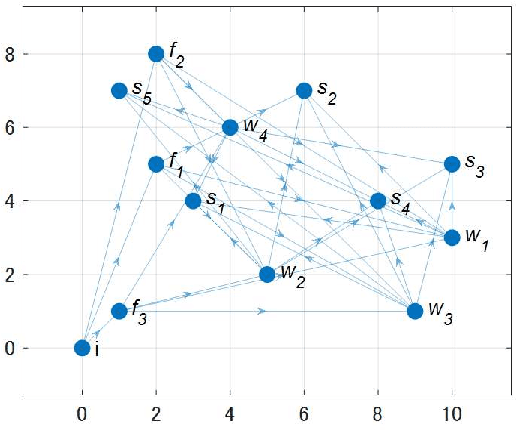
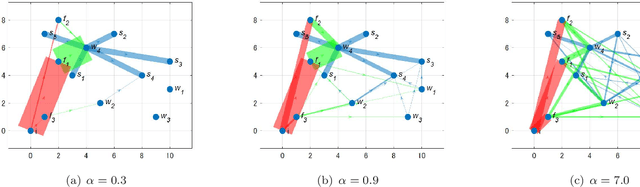
Feb 28, 2024Network systems form the foundation of modern society, playing a critical role in various applications. However, these systems are at significant risk of being adversely affected by unforeseen circumstances, such as disasters. Considering this, there is a pressing need for research to enhance the robustness of network systems. Recently, in reinforcement learning, the relationship between acquiring robustness and regularizing entropy has been identified. Additionally, imitation learning is used within this framework to reflect experts' behavior. However, there are no comprehensive studies on the use of a similar imitation framework for optimal transport on networks. Therefore, in this study, imitation-regularized optimal transport (I-OT) on networks was investigated. It encodes prior knowledge on the network by imitating a given prior distribution. The I-OT solution demonstrated robustness in terms of the cost defined on the network. Moreover, we applied the I-OT to a logistics planning problem using real data. We also examined the imitation and apriori risk information scenarios to demonstrate the usefulness and implications of the proposed method.
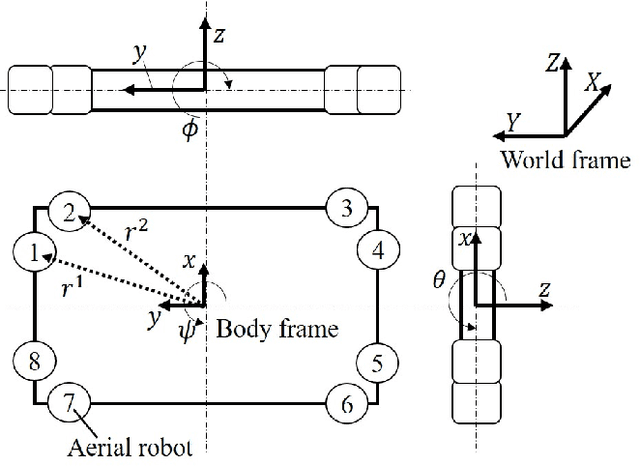
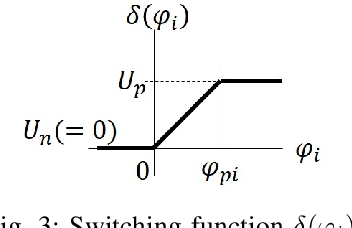
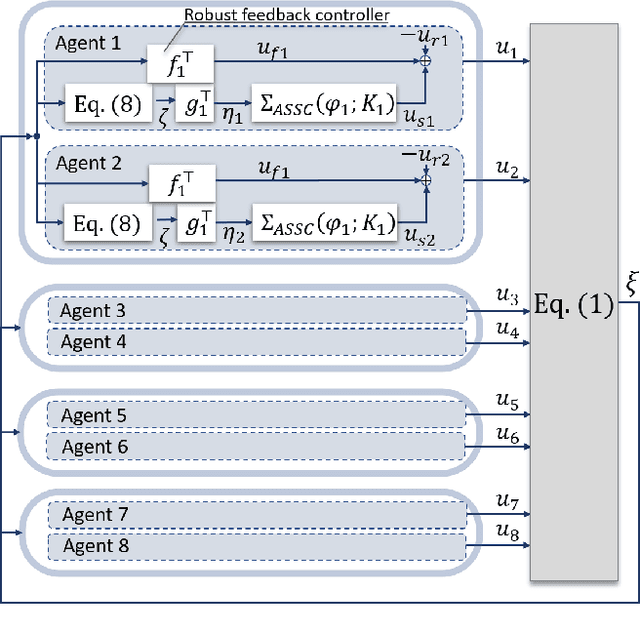
Scratch Team of Single-Rotor Robots and Decentralized Cooperative Transportation with Robot Failure
Jul 03, 2023



Achieving cooperative transportation by teams of aerial robots has been attracting attention owing to its flexibility with respect to payloads and robustness against failures. In this paper, we propose a flexible decentralized controller for the number of robots and the shapes of payloads in a cooperative transport task using multiple single-rotor robots. Our controller is robust to mass and center of mass fluctuations and robot failures. Moreover, asymptotic stability against dynamics errors is guaranteed. Additionally, the controller supports heterogeneous single-rotor robots. Thus, robots with different specifications and deterioration can be effectively utilized for cooperative transportation. In particular, this performance is effective for robot reuse. To achieve the aforementioned performance, the controller consists of a parallel structure comprising two controllers: a feedback controller, which renders the system strictly positive real, and nonlinear controller, which renders the object asymptotic to the target. First, we confirm cooperative transportation using 8 and 10 robots for two shapes via numerical simulation. Subsequently, the cooperative transportation of a rectangle payload (with a weight of approximately 3 kg and maximum length of 1.6 m) is demonstrated using a robot team consisting of three types of robots, even under robot failure and center of mass fluctuation.
Resilience Evaluation of Entropy Regularized Logistic Networks with Probabilistic Cost
Dec 05, 2022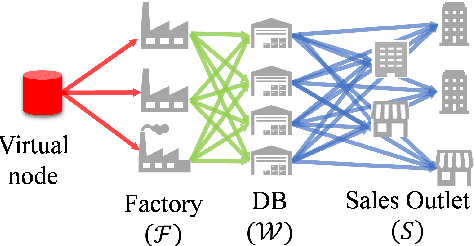
The demand for resilient logistics networks has increased because of recent disasters. When we consider optimization problems, entropy regularization is a powerful tool for the diversification of a solution. In this study, we proposed a method for designing a resilient logistics network based on entropy regularization. Moreover, we proposed a method for analytical resilience criteria to reduce the ambiguity of resilience. First, we modeled the logistics network, including factories, distribution bases, and sales outlets in an efficient framework using entropy regularization. Next, we formulated a resilience criterion based on probabilistic cost and Kullback--Leibler divergence. Finally, our method was performed using a simple logistics network, and the resilience of the three logistics plans designed by entropy regularization was demonstrated.
Cooperative Transportation with Multiple Aerial Robots and Decentralized Control for Unknown Payloads
Nov 03, 2021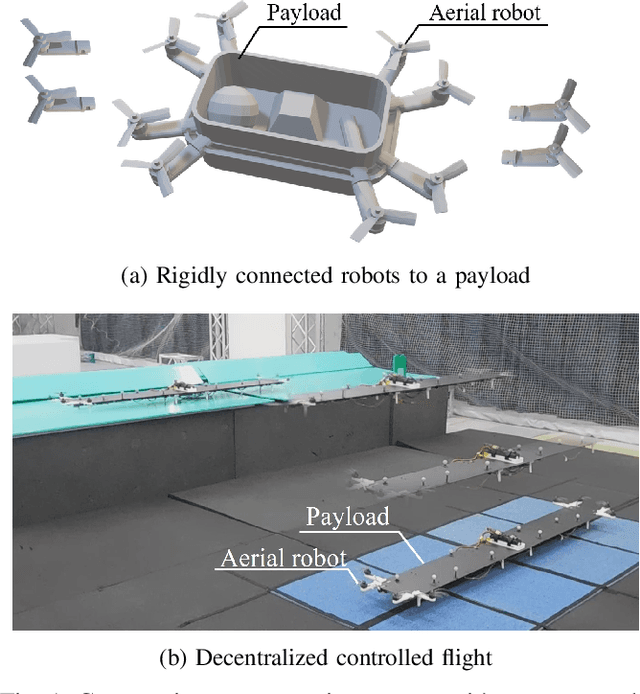
Cooperative transportation by multiple aerial robots has the potential to support various payloads and to reduce the chance of them being dropped. Furthermore, autonomously controlled robots make the system scalable with respect to the payload. In this study, a cooperative transportation system was developed using rigidly attached aerial robots, and a decentralized controller was proposed to guarantee asymptotic stability of the tracking error for unknown strictly positive real systems. A feedback controller was used to transform unstable systems into strictly positive real ones using the shared attachment positions. First, the cooperative transportation of unknown payloads with different shapes larger than the carrier robots was investigated through numerical simulations. Second, cooperative transportation of an unknown payload (with a weight of about 2.7 kg and maximum length of 1.6 m) was demonstrated using eight robots, even under robot failure. Finally, it was shown that the proposed system carried an unknown payload, even if the attachment positions were not shared, that is, even if the asymptotic stability was not strictly guaranteed.
Autonomous Cooperative Transportation System involving Multi-Aerial Robots with Variable Attachment Mechanism
Sep 22, 2021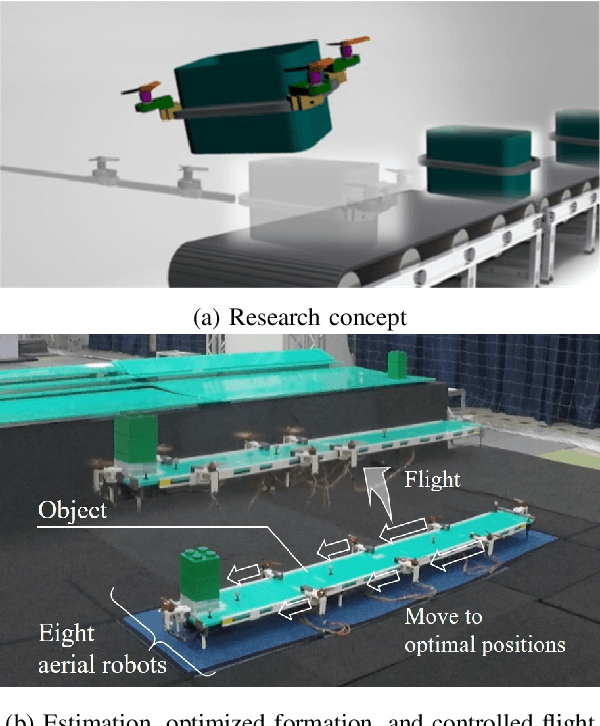
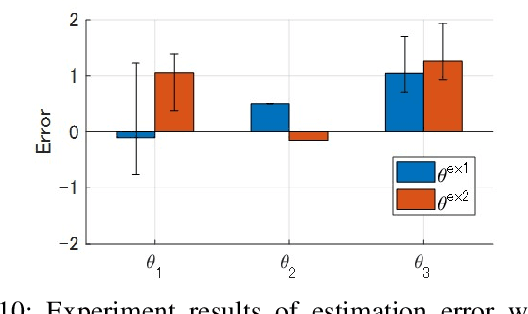
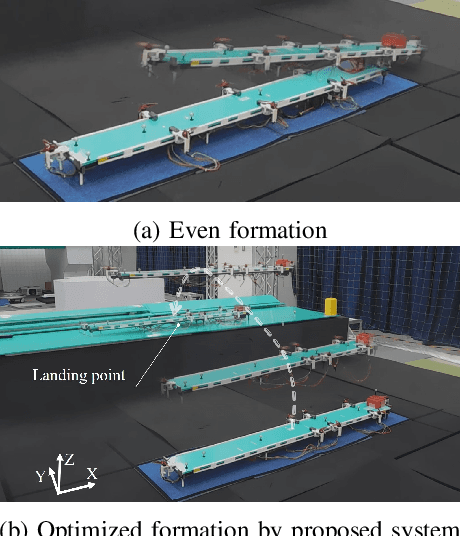
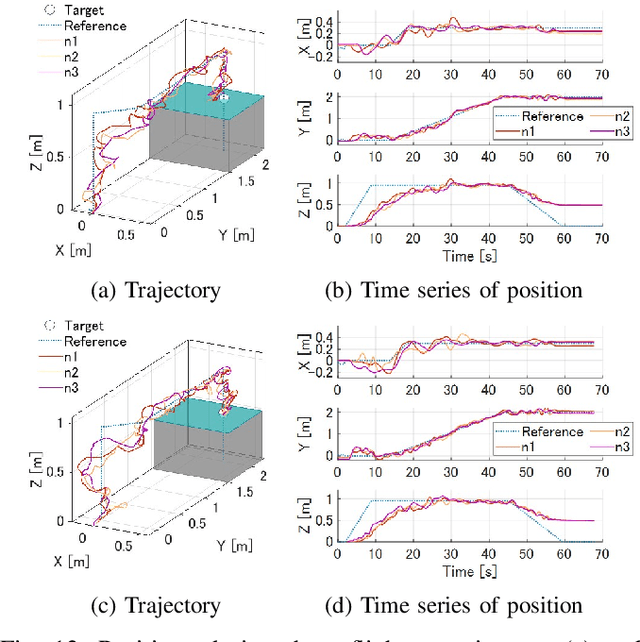
Cooperative transportation by multi-aerial robots has the potential to support various payloads and improve failsafe against dropping. Furthermore, changing the attachment positions of robots according payload characteristics increases the stability of transportation. However, there are almost no transportation systems capable of scaling to the payload weight and size and changing the optimal attachment positions. To address this issue, we propose a cooperative transportation system comprising autonomously executable software and suitable hardware, covering the entire process, from pre-takeoff setting to controlled flight. The proposed system decides the formation of the attachment positions by prioritizing controllability based on the center of gravity obtained from Bayesian estimations with robot pairs. We investigated the cooperative transportation of an unknown payload larger than that of whole carrier robots through numerical simulations. Furthermore, we performed cooperative transportation of an unknown payload (with a weight of about 3.2 kg and maximum length of 1.76 m) using eight robots. The proposed system was found to be versatile with regard to handling unknown payloads with different shapes and center-of-gravity positions.