 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeScratch Team of Single-Rotor Robots and Decentralized Cooperative Transportation with Robot Failure
Jul 03, 2023



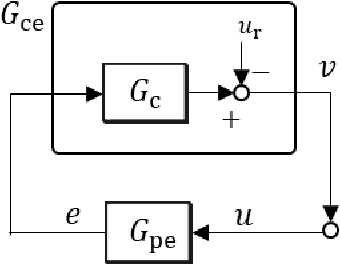
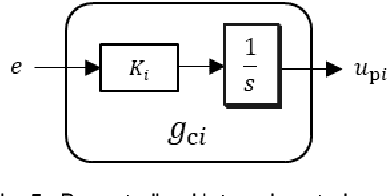
Achieving cooperative transportation by teams of aerial robots has been attracting attention owing to its flexibility with respect to payloads and robustness against failures. In this paper, we propose a flexible decentralized controller for the number of robots and the shapes of payloads in a cooperative transport task using multiple single-rotor robots. Our controller is robust to mass and center of mass fluctuations and robot failures. Moreover, asymptotic stability against dynamics errors is guaranteed. Additionally, the controller supports heterogeneous single-rotor robots. Thus, robots with different specifications and deterioration can be effectively utilized for cooperative transportation. In particular, this performance is effective for robot reuse. To achieve the aforementioned performance, the controller consists of a parallel structure comprising two controllers: a feedback controller, which renders the system strictly positive real, and nonlinear controller, which renders the object asymptotic to the target. First, we confirm cooperative transportation using 8 and 10 robots for two shapes via numerical simulation. Subsequently, the cooperative transportation of a rectangle payload (with a weight of approximately 3 kg and maximum length of 1.6 m) is demonstrated using a robot team consisting of three types of robots, even under robot failure and center of mass fluctuation.
Cooperative Transportation with Multiple Aerial Robots and Decentralized Control for Unknown Payloads
Nov 03, 2021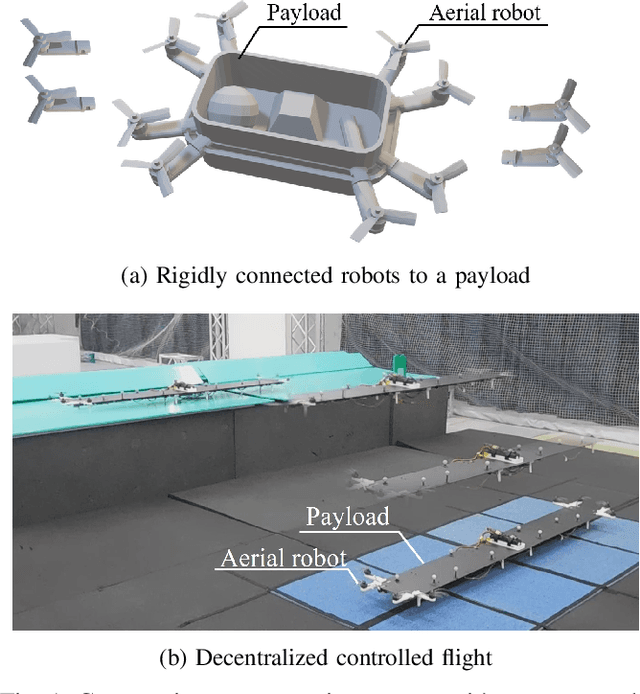
Cooperative transportation by multiple aerial robots has the potential to support various payloads and to reduce the chance of them being dropped. Furthermore, autonomously controlled robots make the system scalable with respect to the payload. In this study, a cooperative transportation system was developed using rigidly attached aerial robots, and a decentralized controller was proposed to guarantee asymptotic stability of the tracking error for unknown strictly positive real systems. A feedback controller was used to transform unstable systems into strictly positive real ones using the shared attachment positions. First, the cooperative transportation of unknown payloads with different shapes larger than the carrier robots was investigated through numerical simulations. Second, cooperative transportation of an unknown payload (with a weight of about 2.7 kg and maximum length of 1.6 m) was demonstrated using eight robots, even under robot failure. Finally, it was shown that the proposed system carried an unknown payload, even if the attachment positions were not shared, that is, even if the asymptotic stability was not strictly guaranteed.
Tracking Control foe Multi-Agent Systems Using Broadcast Signals Based on Positive Realness
Sep 14, 2021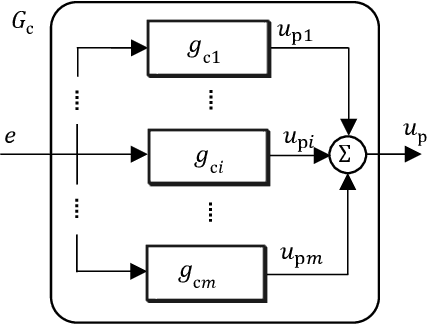
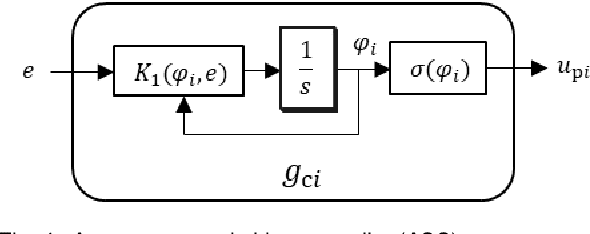
Broadcast control is one of decentralized control methods for networked multi-agent systems. In this method, each agent does not communicate with the others, and autonomously determines its own action using only the same signal sent from a central controller. Therefore, it is effective for systems with numerous agents or no-communication between agents. However, it is difficult to manage the stochastic action process of agents considering engineering applications. This paper proposes a decentralized control such that agents autonomously select the deterministic actions. Firstly, a non-linear controller with a binary output of each agent including 0 is introduced in order to express stop actions autonomously when the target is achieved. The asymptotic stability to the target is proved. Secondly, the controller can adjust the tendency of actions in order to make it easier to manage the actions. Thirdly, the controller is extended to that with a continuous output in order to reduce the tracking error to the target and the output vibration. Finally, the effectiveness of the proposed control is verified by numerical experiments.