 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTracking Control foe Multi-Agent Systems Using Broadcast Signals Based on Positive Realness
Paper and Code
Sep 14, 2021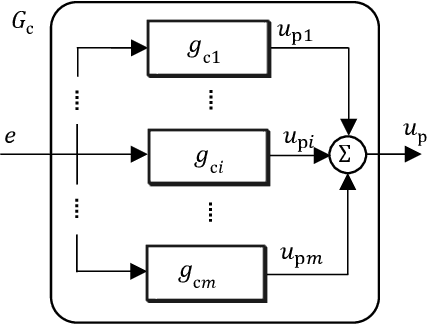
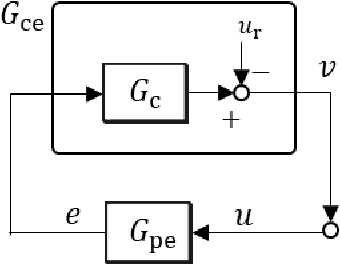
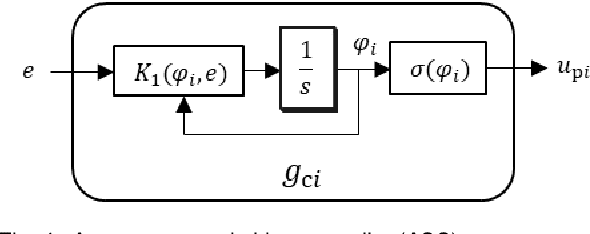
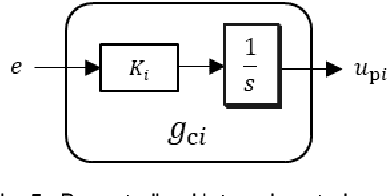
Broadcast control is one of decentralized control methods for networked multi-agent systems. In this method, each agent does not communicate with the others, and autonomously determines its own action using only the same signal sent from a central controller. Therefore, it is effective for systems with numerous agents or no-communication between agents. However, it is difficult to manage the stochastic action process of agents considering engineering applications. This paper proposes a decentralized control such that agents autonomously select the deterministic actions. Firstly, a non-linear controller with a binary output of each agent including 0 is introduced in order to express stop actions autonomously when the target is achieved. The asymptotic stability to the target is proved. Secondly, the controller can adjust the tendency of actions in order to make it easier to manage the actions. Thirdly, the controller is extended to that with a continuous output in order to reduce the tracking error to the target and the output vibration. Finally, the effectiveness of the proposed control is verified by numerical experiments.