 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeThe S2 Hierarchical Discrete Global Grid as a Nexus for Data Representation, Integration, and Querying Across Geospatial Knowledge Graphs
Oct 18, 2024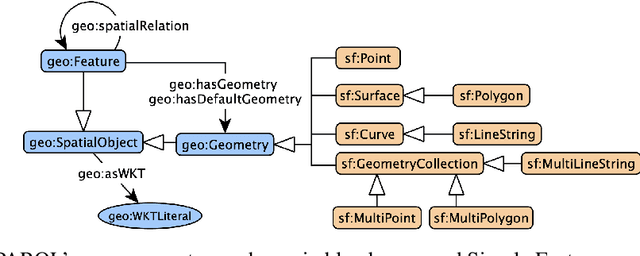


Geospatial Knowledge Graphs (GeoKGs) have become integral to the growing field of Geospatial Artificial Intelligence. Initiatives like the U.S. National Science Foundation's Open Knowledge Network program aim to create an ecosystem of nation-scale, cross-disciplinary GeoKGs that provide AI-ready geospatial data aligned with FAIR principles. However, building this infrastructure presents key challenges, including 1) managing large volumes of data, 2) the computational complexity of discovering topological relations via SPARQL, and 3) conflating multi-scale raster and vector data. Discrete Global Grid Systems (DGGS) help tackle these issues by offering efficient data integration and representation strategies. The KnowWhereGraph utilizes Google's S2 Geometry -- a DGGS framework -- to enable efficient multi-source data processing, qualitative spatial querying, and cross-graph integration. This paper outlines the implementation of S2 within KnowWhereGraph, emphasizing its role in topologically enriching and semantically compressing data. Ultimately, this work demonstrates the potential of DGGS frameworks, particularly S2, for building scalable GeoKGs.
The KnowWhereGraph Ontology
Oct 17, 2024



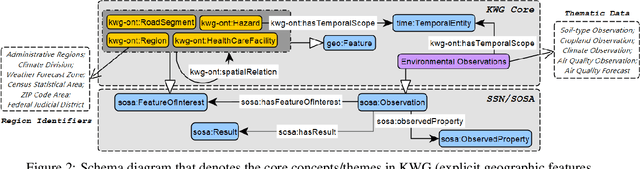
KnowWhereGraph is one of the largest fully publicly available geospatial knowledge graphs. It includes data from 30 layers on natural hazards (e.g., hurricanes, wildfires), climate variables (e.g., air temperature, precipitation), soil properties, crop and land-cover types, demographics, and human health, various place and region identifiers, among other themes. These have been leveraged through the graph by a variety of applications to address challenges in food security and agricultural supply chains; sustainability related to soil conservation practices and farm labor; and delivery of emergency humanitarian aid following a disaster. In this paper, we introduce the ontology that acts as the schema for KnowWhereGraph. This broad overview provides insight into the requirements and design specifications for the graph and its schema, including the development methodology (modular ontology modeling) and the resources utilized to implement, materialize, and deploy KnowWhereGraph with its end-user interfaces and public query SPARQL endpoint.
Here Is Not There: Measuring Entailment-Based Trajectory Similarity for Location-Privacy Protection and Beyond
Dec 02, 2023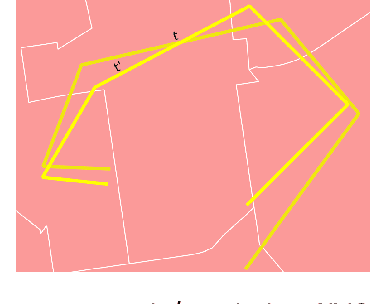
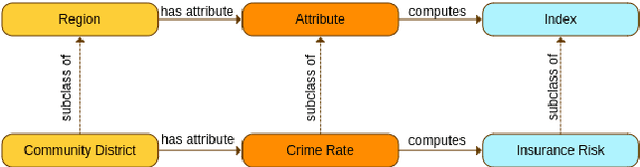
While the paths humans take play out in social as well as physical space, measures to describe and compare their trajectories are carried out in abstract, typically Euclidean, space. When these measures are applied to trajectories of actual individuals in an application area, alterations that are inconsequential in abstract space may suddenly become problematic once overlaid with geographic reality. In this work, we present a different view on trajectory similarity by introducing a measure that utilizes logical entailment. This is an inferential perspective that considers facts as triple statements deduced from the social and environmental context in which the travel takes place, and their practical implications. We suggest a formalization of entailment-based trajectory similarity, measured as the overlapping proportion of facts, which are spatial relation statements in our case study. With the proposed measure, we evaluate LSTM-TrajGAN, a privacy-preserving trajectory-generation model. The entailment-based model evaluation reveals potential consequences of disregarding the rich structure of geographic space (e.g., miscalculated insurance risk due to regional shifts in our toy example). Our work highlights the advantage of applying logical entailment to trajectory-similarity reasoning for location-privacy protection and beyond.