 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOn the Statistical Relation of Ultra-Reliable Wireless and Location Estimation
Aug 28, 2023



Location information is often used as a proxy to guarantee the performance of a wireless communication link. However, localization errors can result in a significant mismatch with the guarantees, particularly detrimental to users operating the ultra-reliable low-latency communication (URLLC) regime. This paper unveils the fundamental statistical relations between location estimation uncertainty and wireless link reliability, specifically in the context of rate selection for ultra-reliable communication. We start with a simple one-dimensional narrowband Rayleigh fading scenario and build towards a two-dimensional scenario in a rich scattering environment. The wireless link reliability is characterized by the meta-probability, the probability with respect to localization error of exceeding the outage capacity, and by removing other sources of errors in the system, we show that reliability is sensitive to localization errors. The $\epsilon$-outage coherence radius is defined and shown to provide valuable insight into the problem of location-based rate selection. However, it is generally challenging to guarantee reliability without accurate knowledge of the propagation environment. Finally, several rate-selection schemes are proposed, showcasing the problem's dynamics and revealing that properly accounting for the localization error is critical to ensure good performance in terms of reliability and achievable throughput.
Localization-based OFDM framework for RIS-aided systems
Mar 22, 2023Efficient integration of reconfigurable intelligent surfaces (RISs) into the current wireless network standard is not a trivial task due to the overhead generated by performing channel estimation (CE) and phase-shift optimization. In this paper, we propose a framework enabling the coexistence between orthogonal-frequency division multiplexing (OFDM) and RIS technologies. Instead of wasting communication symbols for the CE and optimization, the proposed framework exploits the localization information obtainable by RIS-aided communications to provide a robust allocation strategy for user multiplexing. The results demonstrate the effectiveness of the proposed approach with respect to CE-based transmission methods.
Radio Sensing with Large Intelligent Surface for 6G
Nov 04, 2021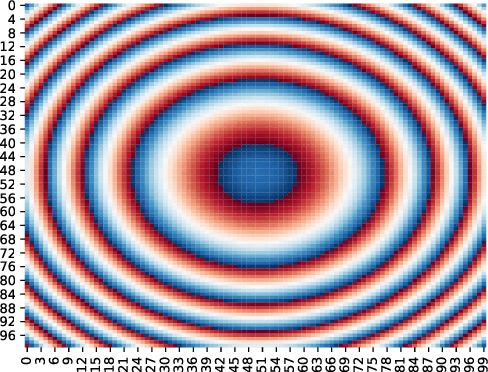
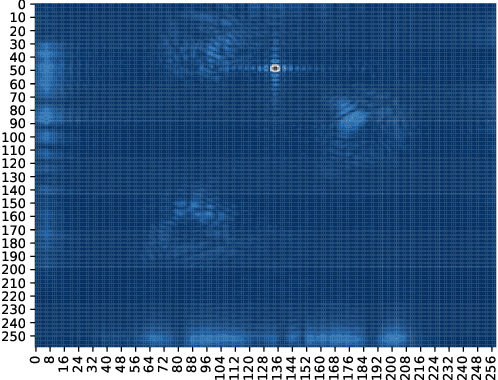
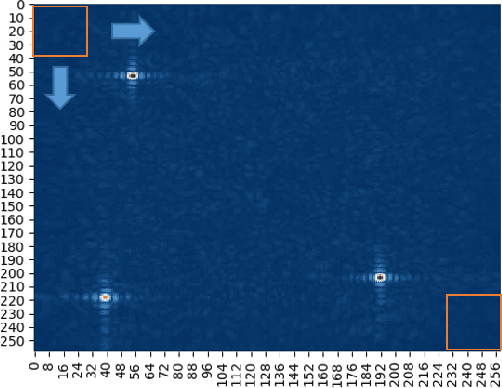
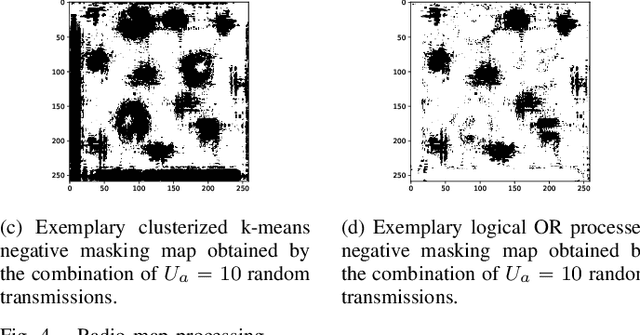
This paper leverages the potential of Large Intelligent Surface (LIS) for radio sensing in 6G wireless networks. Major research has been undergone about its communication capabilities but it can be exploited as a formidable tool for radio sensing. By taking advantage of arbitrary communication signals occurring in the scenario, we apply a Matched Filtering (MF) processing to the output signal from the LIS to obtain a radio map that describes the physical presence of passive devices (scatterers, humans) which act as virtual sources due to the communication signal reflections. We then assess the usage of machine learning (k-means clustering), image processing and computer vision (template matching and component labeling) to extract meaningful information from these radio maps. As an exemplary use case, we evaluate this method for both active and passive user detection in an indoor setting. The results show that the presented method has high application potential as we are able to detect around 98% of humans passively and 100% active users by just using communication signals of commodity devices even in quite unfavorable Signal-to-Noise Ratio (SNR) conditions.
A Primer on the Statistical Relation between Wireless Ultra-Reliability and Location Estimation
Oct 18, 2021



This letter statistically characterizes the impact of location estimation uncertainty in the wireless communication reliability, in which location information is used as a proxy to choose the rate. First, a Cram\'er-Rao bound for the localization error is derived. Then, through a simplified setup, we show that the reliability - characterized by how likely the outage probability is to be above a target threshold - can be sensitive to location errors, especially when the channel statistics are also sensitive to the location. Finally, we highlight the difficulty of choosing a rate that both meets target reliability and accounts for the location uncertainty, and that the most direct solutions suffer from being too conservative.
Assessing Wireless Sensing Potential with Large Intelligent Surfaces
Nov 16, 2020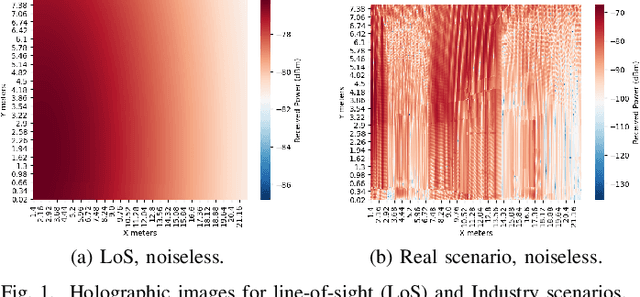
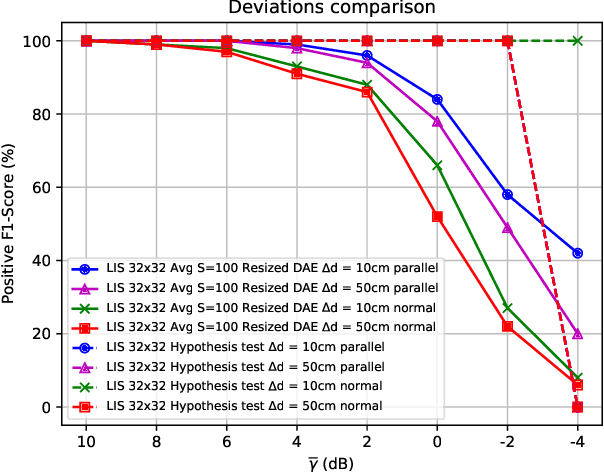


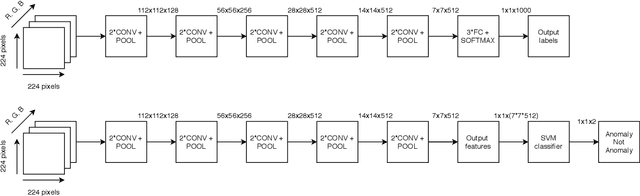
Sensing capability is one of the most highlighted new feature of future 6G wireless networks. This paper addresses the sensing potential of Large Intelligent Surfaces (LIS) in an exemplary Industry 4.0 scenario. Besides the attention received by LIS in terms of communication aspects, it can offer a high-resolution rendering of the propagation environment. This is because, in an indoor setting, it can be placed in proximity to the sensed phenomena, while the high resolution is offered by densely spaced tiny antennas deployed over a large area. By treating an LIS as a radio image of the environment relying on the received signal power, we develop techniques to sense the environment, by leveraging the tools of image processing and machine learning. Once a holographic image is obtained, a Denoising Autoencoder (DAE) network can be used for constructing a super-resolution image leading to sensing advantages not available in traditional sensing systems. Also, we derive a statistical test based on the Generalized Likelihood Ratio (GLRT) as a benchmark for the machine learning solution. We test these methods for a scenario where we need to detect whether an industrial robot deviates from a predefined route. The results show that the LIS-based sensing offers high precision and has a high application potential in indoor industrial environments.
A Primer on Large Intelligent Surface for Wireless Sensing in an Industrial Setting
Jun 11, 2020
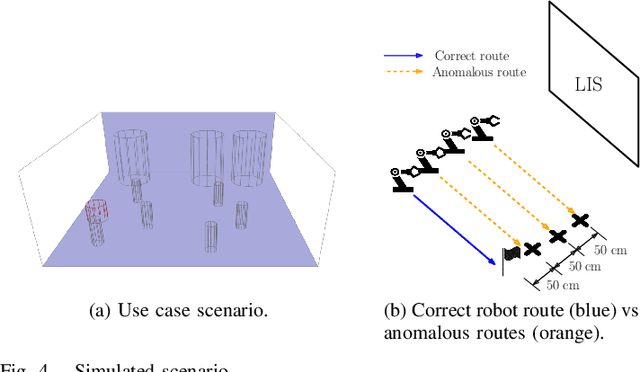
One of the beyond-5G developments that is often highlighted is the integration of wireless communication and radio sensing. This paper addresses the potential of communication-sensing integration of Large Intelligent Surfaces (LIS) in an exemplary Industry 4.0 scenario. Besides the potential for high throughput and efficient multiplexing of wireless links, a LIS can offer a high-resolution rendering of the propagation environment. This is because, in an indoor setting, it can be placed in proximity to the sensed phenomena, while the high resolution is offered by densely spaced tiny antennas deployed over a large area. By treating a LIS as a radio image of the environment, we develop sensing techniques that leverage the tools of image processing and computer vision combined with machine learning. We test these methods for a scenario where we need to detect whether an industrial robot deviates from a predefined route. The results show that the LIS-based sensing offers high precision and has a high application potential in indoor industrial environments.