 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeuro-symbolic Explainable Artificial Intelligence Twin for Zero-touch IoE in Wireless Network
Oct 13, 2022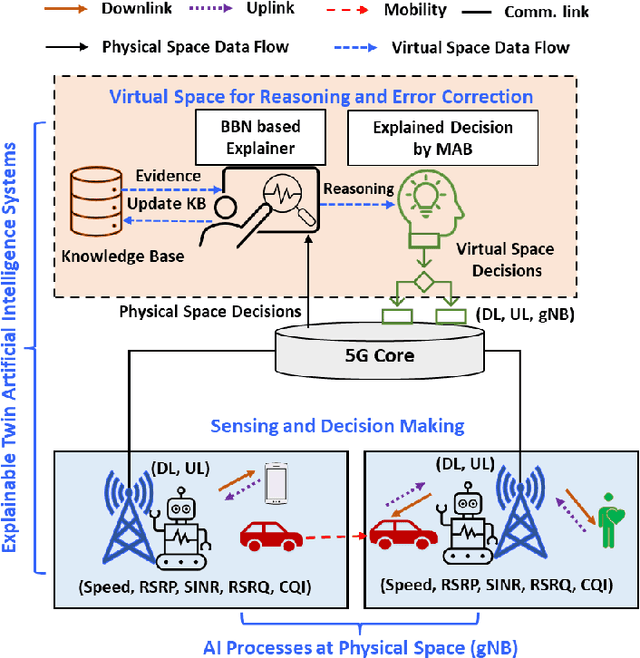
Explainable artificial intelligence (XAI) twin systems will be a fundamental enabler of zero-touch network and service management (ZSM) for sixth-generation (6G) wireless networks. A reliable XAI twin system for ZSM requires two composites: an extreme analytical ability for discretizing the physical behavior of the Internet of Everything (IoE) and rigorous methods for characterizing the reasoning of such behavior. In this paper, a novel neuro-symbolic explainable artificial intelligence twin framework is proposed to enable trustworthy ZSM for a wireless IoE. The physical space of the XAI twin executes a neural-network-driven multivariate regression to capture the time-dependent wireless IoE environment while determining unconscious decisions of IoE service aggregation. Subsequently, the virtual space of the XAI twin constructs a directed acyclic graph (DAG)-based Bayesian network that can infer a symbolic reasoning score over unconscious decisions through a first-order probabilistic language model. Furthermore, a Bayesian multi-arm bandits-based learning problem is proposed for reducing the gap between the expected explained score and the current obtained score of the proposed neuro-symbolic XAI twin. To address the challenges of extensible, modular, and stateless management functions in ZSM, the proposed neuro-symbolic XAI twin framework consists of two learning systems: 1) an implicit learner that acts as an unconscious learner in physical space, and 2) an explicit leaner that can exploit symbolic reasoning based on implicit learner decisions and prior evidence. Experimental results show that the proposed neuro-symbolic XAI twin can achieve around 96.26% accuracy while guaranteeing from 18% to 44% more trust score in terms of reasoning and closed-loop automation.
Risk Adversarial Learning System for Connected and Autonomous Vehicle Charging
Aug 02, 2021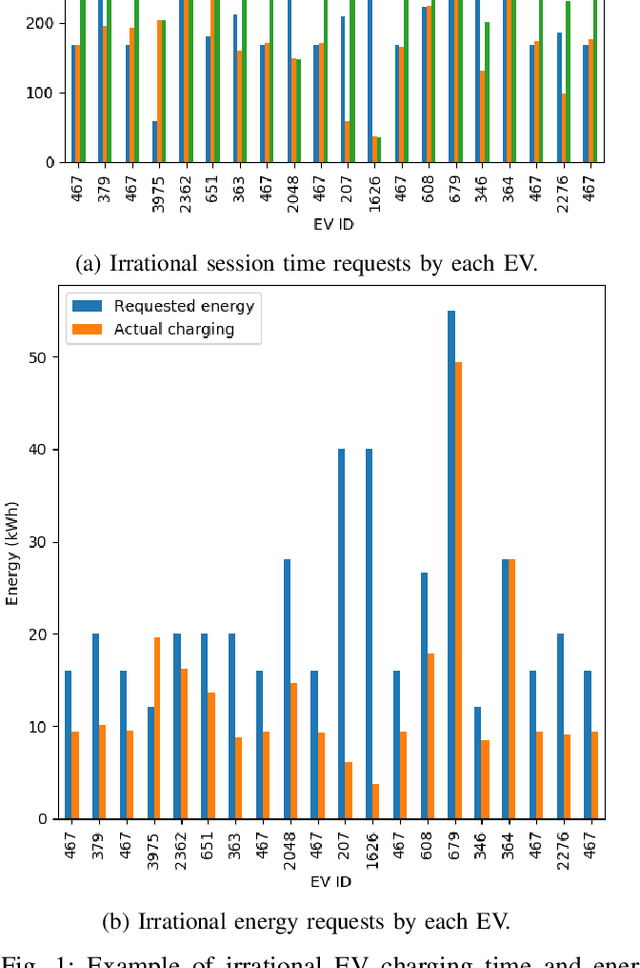
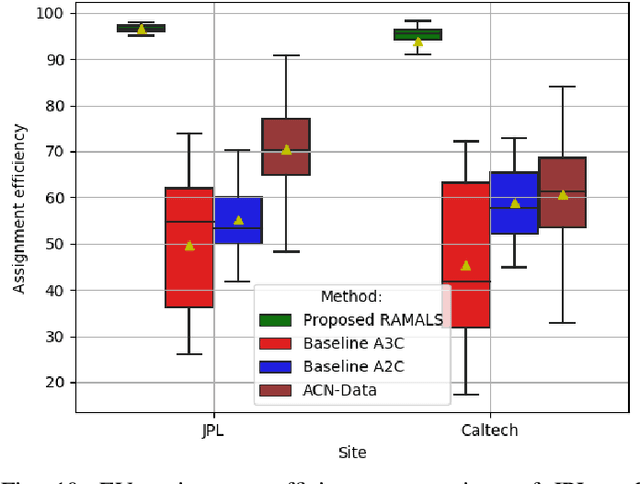
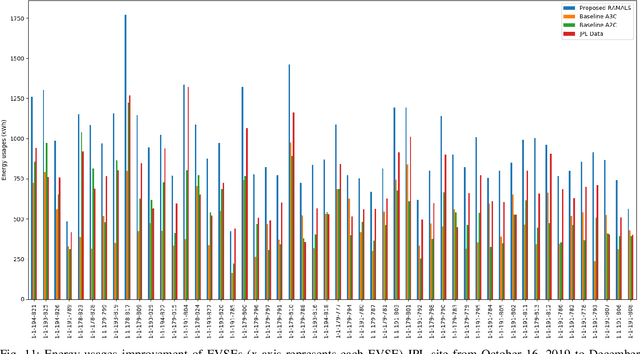
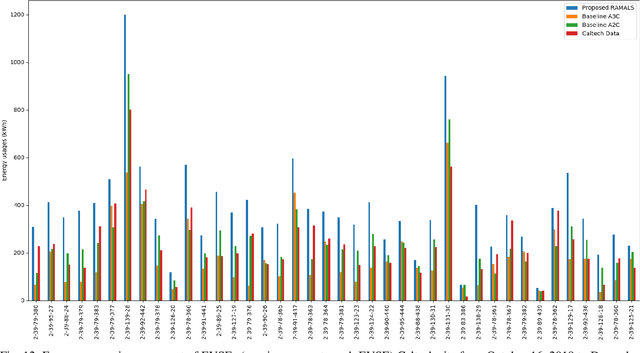
In this paper, the design of a rational decision support system (RDSS) for a connected and autonomous vehicle charging infrastructure (CAV-CI) is studied. In the considered CAV-CI, the distribution system operator (DSO) deploys electric vehicle supply equipment (EVSE) to provide an EV charging facility for human-driven connected vehicles (CVs) and autonomous vehicles (AVs). The charging request by the human-driven EV becomes irrational when it demands more energy and charging period than its actual need. Therefore, the scheduling policy of each EVSE must be adaptively accumulated the irrational charging request to satisfy the charging demand of both CVs and AVs. To tackle this, we formulate an RDSS problem for the DSO, where the objective is to maximize the charging capacity utilization by satisfying the laxity risk of the DSO. Thus, we devise a rational reward maximization problem to adapt the irrational behavior by CVs in a data-informed manner. We propose a novel risk adversarial multi-agent learning system (RAMALS) for CAV-CI to solve the formulated RDSS problem. In RAMALS, the DSO acts as a centralized risk adversarial agent (RAA) for informing the laxity risk to each EVSE. Subsequently, each EVSE plays the role of a self-learner agent to adaptively schedule its own EV sessions by coping advice from RAA. Experiment results show that the proposed RAMALS affords around 46.6% improvement in charging rate, about 28.6% improvement in the EVSE's active charging time and at least 33.3% more energy utilization, as compared to a currently deployed ACN EVSE system, and other baselines.
Drive Safe: Cognitive-Behavioral Mining for Intelligent Transportation Cyber-Physical System
Aug 24, 2020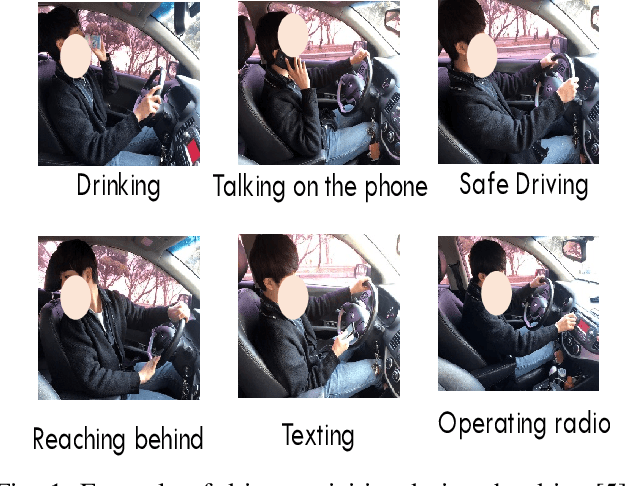
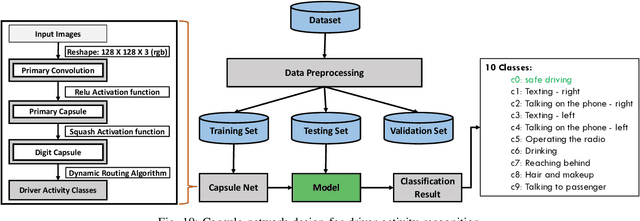
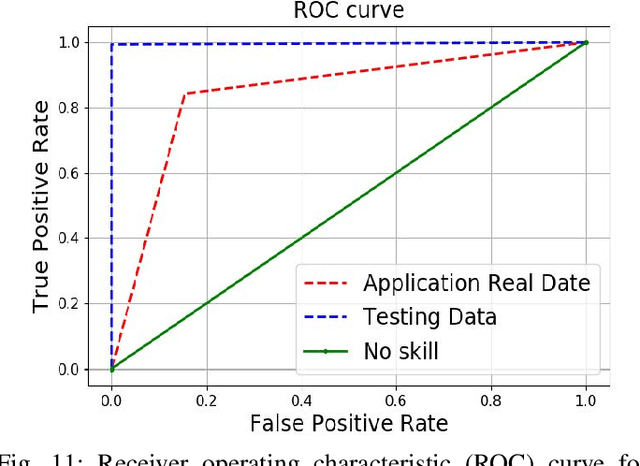
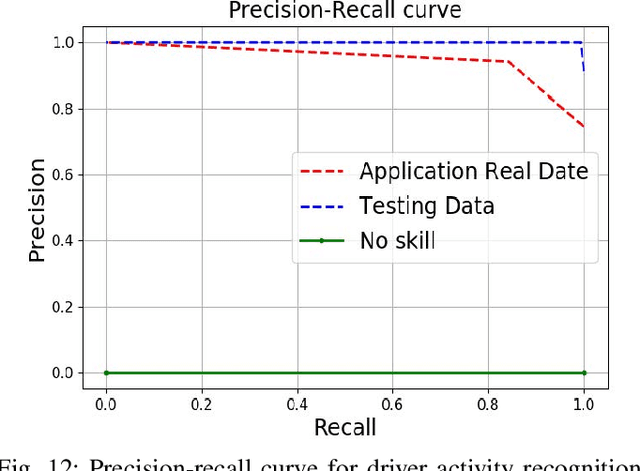
This paper presents a cognitive behavioral-based driver mood repairment platform in intelligent transportation cyber-physical systems (IT-CPS) for road safety. In particular, we propose a driving safety platform for distracted drivers, namely \emph{drive safe}, in IT-CPS. The proposed platform recognizes the distracting activities of the drivers as well as their emotions for mood repair. Further, we develop a prototype of the proposed drive safe platform to establish proof-of-concept (PoC) for the road safety in IT-CPS. In the developed driving safety platform, we employ five AI and statistical-based models to infer a vehicle driver's cognitive-behavioral mining to ensure safe driving during the drive. Especially, capsule network (CN), maximum likelihood (ML), convolutional neural network (CNN), Apriori algorithm, and Bayesian network (BN) are deployed for driver activity recognition, environmental feature extraction, mood recognition, sequential pattern mining, and content recommendation for affective mood repairment of the driver, respectively. Besides, we develop a communication module to interact with the systems in IT-CPS asynchronously. Thus, the developed drive safe PoC can guide the vehicle drivers when they are distracted from driving due to the cognitive-behavioral factors. Finally, we have performed a qualitative evaluation to measure the usability and effectiveness of the developed drive safe platform. We observe that the P-value is 0.0041 (i.e., < 0.05) in the ANOVA test. Moreover, the confidence interval analysis also shows significant gains in prevalence value which is around 0.93 for a 95% confidence level. The aforementioned statistical results indicate high reliability in terms of driver's safety and mental state.