 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMirrorDrift: Actuated Mirror-Based Attacks on LiDAR SLAM
Mar 11, 2026LiDAR SLAM provides high-accuracy localization but is fragile to point-cloud corruption because scan matching assumes geometric consistency. Prior physical attacks on LiDAR SLAM largely rely on LiDAR spoofing via external signal injection, which requires sensor-specific timing knowledge and is increasingly mitigated by modern defense mechanisms such as timing obfuscation and injection rejection. In this work, we show that specular reflection offers an injection-free alternative and demonstrate an attack, MirrorDrift, that uses an actuated planar mirror to cause ghost points in LiDAR scans and systematically bias scan-matching correspondences. MirrorDrift optimizes mirror placement, alignment, and actuation. In simulation, it increases the average pose error (APE) by 6.1x over random placement, degrading three SLAM systems to 2.29-3.31 m mean APE. In real-world experiments on a modern LiDAR with state-of-the-art interference mitigation, it induces localization errors of up to 6.03 m. To the best of our knowledge, this is the first successful SLAM-targeted attack against production-grade secure LiDARs.
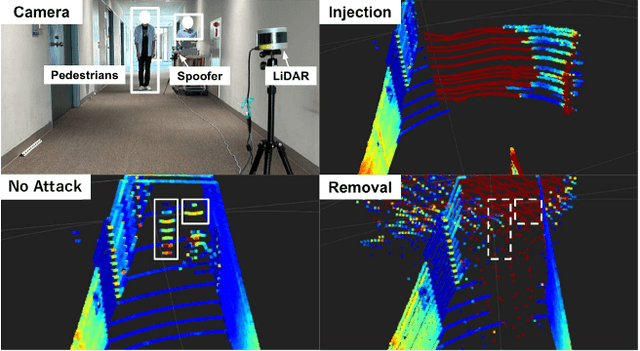
D-SLAMSpoof: An Environment-Agnostic LiDAR Spoofing Attack using Dynamic Point Cloud Injection
Mar 11, 2026In this work, we introduce Dynamic SLAMSpoof (D-SLAMSpoof), a novel attack that compromises LiDAR SLAM even in feature-rich environments. The attack leverages LiDAR spoofing, which injects spurious measurements into LiDAR scans through external laser interference. By designing both spatial injection shapes and temporally coordinated dynamic injection patterns guided by scan-matching principles, D-SLAMSpoof significantly improves attack success rates in real-world, feature-rich environments such as urban areas and indoor spaces, where conventional LiDAR spoofing methods often fail. Furthermore, we propose a practical defense method, ISD-SLAM, that relies solely on inertial dead reckoning signals commonly available in autonomous systems. We demonstrate that ISD-SLAM accurately detects LiDAR spoofing attacks, including D-SLAMSpoof, and effectively mitigates the resulting position drift. Our findings expose inherent vulnerabilities in LiDAR-based SLAM and introduce the first practical defense against LiDAR-based SLAM spoofing using only standard onboard sensors, providing critical insights for improving the security and reliability of autonomous systems.
Tightly-Coupled LiDAR-IMU-Leg Odometry with Online Learned Leg Kinematics Incorporating Foot Tactile Information
Jun 11, 2025In this letter, we present tightly coupled LiDAR-IMU-leg odometry, which is robust to challenging conditions such as featureless environments and deformable terrains. We developed an online learning-based leg kinematics model named the neural leg kinematics model, which incorporates tactile information (foot reaction force) to implicitly express the nonlinear dynamics between robot feet and the ground. Online training of this model enhances its adaptability to weight load changes of a robot (e.g., assuming delivery or transportation tasks) and terrain conditions. According to the \textit{neural adaptive leg odometry factor} and online uncertainty estimation of the leg kinematics model-based motion predictions, we jointly solve online training of this kinematics model and odometry estimation on a unified factor graph to retain the consistency of both. The proposed method was verified through real experiments using a quadruped robot in two challenging situations: 1) a sandy beach, representing an extremely featureless area with a deformable terrain, and 2) a campus, including multiple featureless areas and terrain types of asphalt, gravel (deformable terrain), and grass. Experimental results showed that our odometry estimation incorporating the \textit{neural leg kinematics model} outperforms state-of-the-art works. Our project page is available for further details: https://takuokawara.github.io/RAL2025_project_page/
Tightly Coupled Range Inertial Odometry and Mapping with Exact Point Cloud Downsampling
May 02, 2025In this work, to facilitate the real-time processing of multi-scan registration error minimization on factor graphs, we devise a point cloud downsampling algorithm based on coreset extraction. This algorithm extracts a subset of the residuals of input points such that the subset yields exactly the same quadratic error function as that of the original set for a given pose. This enables a significant reduction in the number of residuals to be evaluated without approximation errors at the sampling point. Using this algorithm, we devise a complete SLAM framework that consists of odometry estimation based on sliding window optimization and global trajectory optimization based on registration error minimization over the entire map, both of which can run in real time on a standard CPU. The experimental results demonstrate that the proposed framework outperforms state-of-the-art CPU-based SLAM frameworks without the use of GPU acceleration.
Range-based 6-DoF Monte Carlo SLAM with Gradient-guided Particle Filter on GPU
Apr 25, 2025This paper presents range-based 6-DoF Monte Carlo SLAM with a gradient-guided particle update strategy. While non-parametric state estimation methods, such as particle filters, are robust in situations with high ambiguity, they are known to be unsuitable for high-dimensional problems due to the curse of dimensionality. To address this issue, we propose a particle update strategy that improves the sampling efficiency by using the gradient information of the likelihood function to guide particles toward its mode. Additionally, we introduce a keyframe-based map representation that represents the global map as a set of past frames (i.e., keyframes) to mitigate memory consumption. The keyframe poses for each particle are corrected using a simple loop closure method to maintain trajectory consistency. The combination of gradient information and keyframe-based map representation significantly enhances sampling efficiency and reduces memory usage compared to traditional RBPF approaches. To process a large number of particles (e.g., 100,000 particles) in real-time, the proposed framework is designed to fully exploit GPU parallel processing. Experimental results demonstrate that the proposed method exhibits extreme robustness to state ambiguity and can even deal with kidnapping situations, such as when the sensor moves to different floors via an elevator, with minimal heuristics.
SLAMSpoof: Practical LiDAR Spoofing Attacks on Localization Systems Guided by Scan Matching Vulnerability Analysis
Feb 19, 2025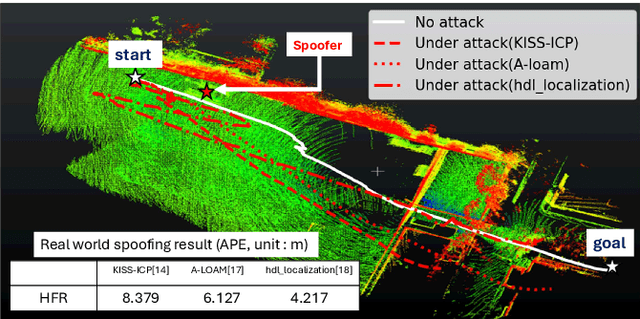
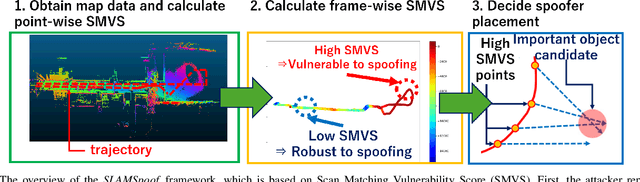
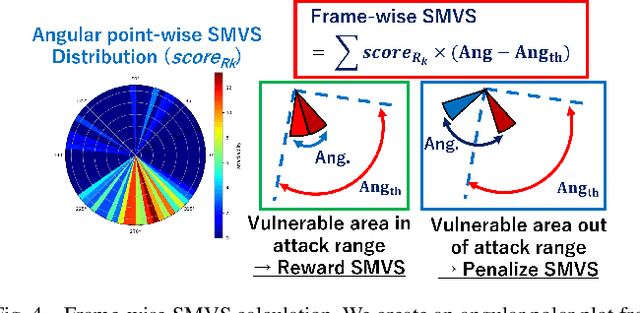
Accurate localization is essential for enabling modern full self-driving services. These services heavily rely on map-based traffic information to reduce uncertainties in recognizing lane shapes, traffic light locations, and traffic signs. Achieving this level of reliance on map information requires centimeter-level localization accuracy, which is currently only achievable with LiDAR sensors. However, LiDAR is known to be vulnerable to spoofing attacks that emit malicious lasers against LiDAR to overwrite its measurements. Once localization is compromised, the attack could lead the victim off roads or make them ignore traffic lights. Motivated by these serious safety implications, we design SLAMSpoof, the first practical LiDAR spoofing attack on localization systems for self-driving to assess the actual attack significance on autonomous vehicles. SLAMSpoof can effectively find the effective attack location based on our scan matching vulnerability score (SMVS), a point-wise metric representing the potential vulnerability to spoofing attacks. To evaluate the effectiveness of the attack, we conduct real-world experiments on ground vehicles and confirm its high capability in real-world scenarios, inducing position errors of $\geq$4.2 meters (more than typical lane width) for all 3 popular LiDAR-based localization algorithms. We finally discuss the potential countermeasures of this attack. Code is available at https://github.com/Keio-CSG/slamspoof
GLIM: 3D Range-Inertial Localization and Mapping with GPU-Accelerated Scan Matching Factors
Jul 14, 2024This article presents GLIM, a 3D range-inertial localization and mapping framework with GPU-accelerated scan matching factors. The odometry estimation module of GLIM employs a combination of fixed-lag smoothing and keyframe-based point cloud matching that makes it possible to deal with a few seconds of completely degenerated range data while efficiently reducing trajectory estimation drift. It also incorporates multi-camera visual feature constraints in a tightly coupled way to further improve the stability and accuracy. The global trajectory optimization module directly minimizes the registration errors between submaps over the entire map. This approach enables us to accurately constrain the relative pose between submaps with a small overlap. Although both the odometry estimation and global trajectory optimization algorithms require much more computation than existing methods, we show that they can be run in real-time due to the careful design of the registration error evaluation algorithm and the entire system to fully leverage GPU parallel processing.
MegaParticles: Range-based 6-DoF Monte Carlo Localization with GPU-Accelerated Stein Particle Filter
Apr 25, 2024This paper presents a 6-DoF range-based Monte Carlo localization method with a GPU-accelerated Stein particle filter. To update a massive amount of particles, we propose a Gauss-Newton-based Stein variational gradient descent (SVGD) with iterative neighbor particle search. This method uses SVGD to collectively update particle states with gradient and neighborhood information, which provides efficient particle sampling. For an efficient neighbor particle search, it uses locality sensitive hashing and iteratively updates the neighbor list of each particle over time. The neighbor list is then used to propagate the posterior probabilities of particles over the neighbor particle graph. The proposed method is capable of evaluating one million particles in real-time on a single GPU and enables robust pose initialization and re-localization without an initial pose estimate. In experiments, the proposed method showed an extreme robustness to complete sensor occlusion (i.e., kidnapping), and enabled pinpoint sensor localization without any prior information.
Tightly-Coupled LiDAR-IMU-Wheel Odometry with Online Calibration of a Kinematic Model for Skid-Steering Robots
Apr 03, 2024Tunnels and long corridors are challenging environments for mobile robots because a LiDAR point cloud should degenerate in these environments. To tackle point cloud degeneration, this study presents a tightly-coupled LiDAR-IMU-wheel odometry algorithm with an online calibration for skid-steering robots. We propose a full linear wheel odometry factor, which not only serves as a motion constraint but also performs the online calibration of kinematic models for skid-steering robots. Despite the dynamically changing kinematic model (e.g., wheel radii changes caused by tire pressures) and terrain conditions, our method can address the model error via online calibration. Moreover, our method enables an accurate localization in cases of degenerated environments, such as long and straight corridors, by calibration while the LiDAR-IMU fusion sufficiently operates. Furthermore, we estimate the uncertainty (i.e., covariance matrix) of the wheel odometry online for creating a reasonable constraint. The proposed method is validated through three experiments. The first indoor experiment shows that the proposed method is robust in severe degeneracy cases (long corridors) and changes in the wheel radii. The second outdoor experiment demonstrates that our method accurately estimates the sensor trajectory despite being in rough outdoor terrain owing to online uncertainty estimation of wheel odometry. The third experiment shows the proposed online calibration enables robust odometry estimation in changing terrains.
Tightly Coupled Range Inertial Localization on a 3D Prior Map Based on Sliding Window Factor Graph Optimization
Feb 08, 2024This paper presents a range inertial localization algorithm for a 3D prior map. The proposed algorithm tightly couples scan-to-scan and scan-to-map point cloud registration factors along with IMU factors on a sliding window factor graph. The tight coupling of the scan-to-scan and scan-to-map registration factors enables a smooth fusion of sensor ego-motion estimation and map-based trajectory correction that results in robust tracking of the sensor pose under severe point cloud degeneration and defective regions in a map. We also propose an initial sensor state estimation algorithm that robustly estimates the gravity direction and IMU state and helps perform global localization in 3- or 4-DoF for system initialization without prior position information. Experimental results show that the proposed method outperforms existing state-of-the-art methods in extremely severe situations where the point cloud data becomes degenerate, there are momentary sensor interruptions, or the sensor moves along the map boundary or into unmapped regions.