 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNeural Reconstruction of LiDAR Point Clouds under Jamming Attacks via Full-Waveform Representation and Simultaneous Laser Sensing
Apr 01, 2026LiDAR sensors are critical for autonomous driving perception, yet remain vulnerable to spoofing attacks. Jamming attacks inject high-frequency laser pulses that completely blind LiDAR sensors by overwhelming authentic returns with malicious signals. We discover that while point clouds become randomized, the underlying full-waveform data retains distinguishable signatures between attack and legitimate signals. In this work, we propose PULSAR-Net, capable of reconstructing authentic point clouds under jamming attacks by leveraging previously underutilized intermediate full-waveform representations and simultaneous laser sensing in modern LiDAR systems. PULSAR-Net adopts a novel U-Net architecture with axial spatial attention mechanisms specifically designed to identify attack-induced signals from authentic object returns in the full-waveform representation. To address the lack of full-waveform representations in existing LiDAR datasets under jamming attacks, we introduce a physics-aware dataset generation pipeline that synthesizes realistic full-waveform representations under jamming attacks. Despite being trained exclusively on synthetic data, PULSAR-Net achieves reconstruction rates of 92% and 73% for vehicles obscured by jamming attacks in real-world static and driving scenarios, respectively.
SLAMSpoof: Practical LiDAR Spoofing Attacks on Localization Systems Guided by Scan Matching Vulnerability Analysis
Feb 19, 2025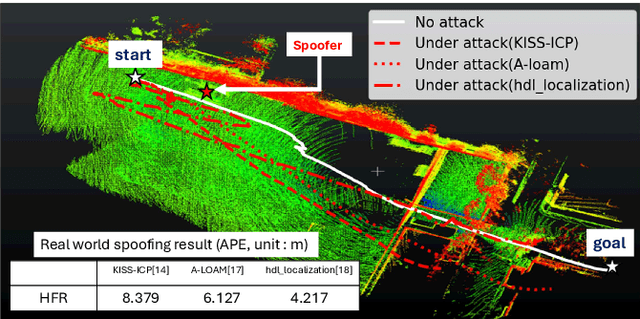
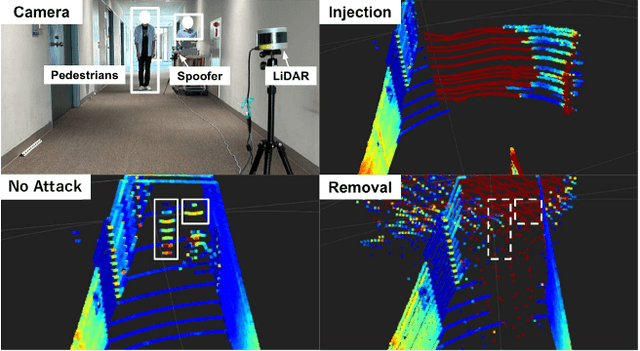
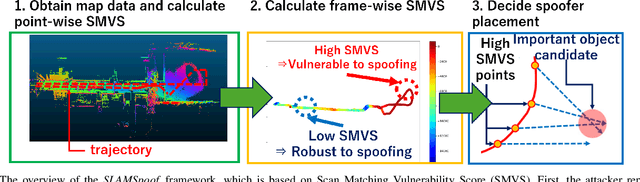
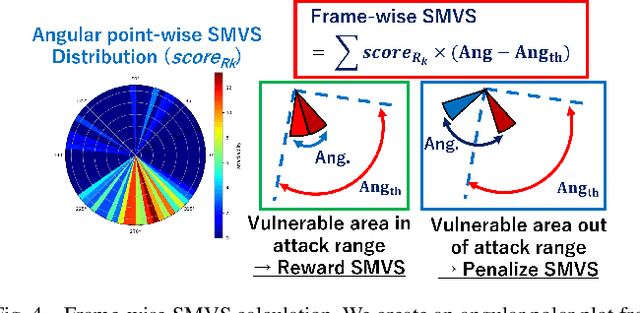
Accurate localization is essential for enabling modern full self-driving services. These services heavily rely on map-based traffic information to reduce uncertainties in recognizing lane shapes, traffic light locations, and traffic signs. Achieving this level of reliance on map information requires centimeter-level localization accuracy, which is currently only achievable with LiDAR sensors. However, LiDAR is known to be vulnerable to spoofing attacks that emit malicious lasers against LiDAR to overwrite its measurements. Once localization is compromised, the attack could lead the victim off roads or make them ignore traffic lights. Motivated by these serious safety implications, we design SLAMSpoof, the first practical LiDAR spoofing attack on localization systems for self-driving to assess the actual attack significance on autonomous vehicles. SLAMSpoof can effectively find the effective attack location based on our scan matching vulnerability score (SMVS), a point-wise metric representing the potential vulnerability to spoofing attacks. To evaluate the effectiveness of the attack, we conduct real-world experiments on ground vehicles and confirm its high capability in real-world scenarios, inducing position errors of $\geq$4.2 meters (more than typical lane width) for all 3 popular LiDAR-based localization algorithms. We finally discuss the potential countermeasures of this attack. Code is available at https://github.com/Keio-CSG/slamspoof
Revisiting LiDAR Spoofing Attack Capabilities against Object Detection: Improvements, Measurement, and New Attack
Mar 19, 2023



LiDAR (Light Detection And Ranging) is an indispensable sensor for precise long- and wide-range 3D sensing, which directly benefited the recent rapid deployment of autonomous driving (AD). Meanwhile, such a safety-critical application strongly motivates its security research. A recent line of research demonstrates that one can manipulate the LiDAR point cloud and fool object detection by firing malicious lasers against LiDAR. However, these efforts face 3 critical research gaps: (1) evaluating only on a specific LiDAR (VLP-16); (2) assuming unvalidated attack capabilities; and (3) evaluating with models trained on limited datasets. To fill these critical research gaps, we conduct the first large-scale measurement study on LiDAR spoofing attack capabilities on object detectors with 9 popular LiDARs in total and 3 major types of object detectors. To perform this measurement, we significantly improved the LiDAR spoofing capability with more careful optics and functional electronics, which allows us to be the first to clearly demonstrate and quantify key attack capabilities assumed in prior works. However, we further find that such key assumptions actually can no longer hold for all the other (8 out of 9) LiDARs that are more recent than VLP-16 due to various recent LiDAR features. To this end, we further identify a new type of LiDAR spoofing attack that can improve on this and be applicable to a much more general and recent set of LiDARs. We find that its attack capability is enough to (1) cause end-to-end safety hazards in simulated AD scenarios, and (2) remove real vehicles in the physical world. We also discuss the defense side.