 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA benchmark for computational analysis of animal behavior, using animal-borne tags
May 18, 2023Animal-borne sensors ('bio-loggers') can record a suite of kinematic and environmental data, which can elucidate animal ecophysiology and improve conservation efforts. Machine learning techniques are useful for interpreting the large amounts of data recorded by bio-loggers, but there exists no standard for comparing the different machine learning techniques in this domain. To address this, we present the Bio-logger Ethogram Benchmark (BEBE), a collection of datasets with behavioral annotations, standardized modeling tasks, and evaluation metrics. BEBE is to date the largest, most taxonomically diverse, publicly available benchmark of this type, and includes 1654 hours of data collected from 149 individuals across nine taxa. We evaluate the performance of ten different machine learning methods on BEBE, and identify key challenges to be addressed in future work. Datasets, models, and evaluation code are made publicly available at https://github.com/earthspecies/BEBE, to enable community use of BEBE as a point of comparison in methods development.
Learning interaction rules from multi-animal trajectories via augmented behavioral models
Jul 14, 2021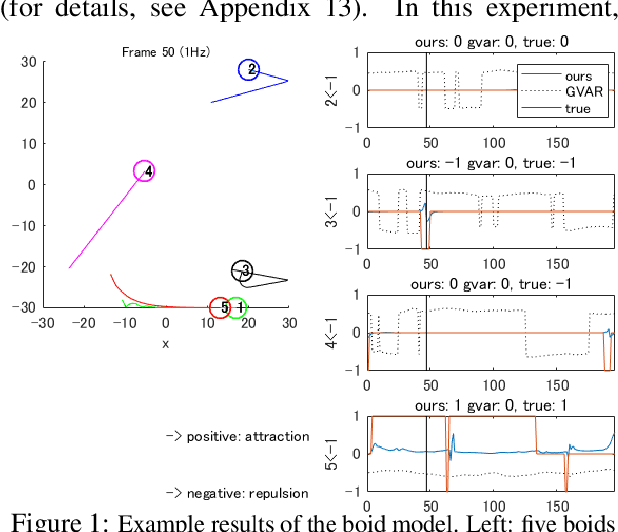
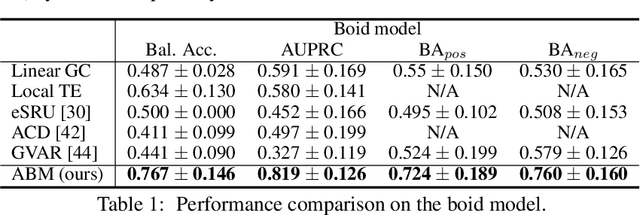
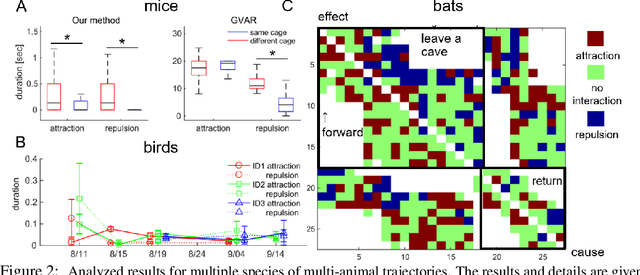
Extracting the interaction rules of biological agents from moving sequences pose challenges in various domains. Granger causality is a practical framework for analyzing the interactions from observed time-series data; however, this framework ignores the structures of the generative process in animal behaviors, which may lead to interpretational problems and sometimes erroneous assessments of causality. In this paper, we propose a new framework for learning Granger causality from multi-animal trajectories via augmented theory-based behavioral models with interpretable data-driven models. We adopt an approach for augmenting incomplete multi-agent behavioral models described by time-varying dynamical systems with neural networks. For efficient and interpretable learning, our model leverages theory-based architectures separating navigation and motion processes, and the theory-guided regularization for reliable behavioral modeling. This can provide interpretable signs of Granger-causal effects over time, i.e., when specific others cause the approach or separation. In experiments using synthetic datasets, our method achieved better performance than various baselines. We then analyzed multi-animal datasets of mice, flies, birds, and bats, which verified our method and obtained novel biological insights.
Improved Activity Forecasting for Generating Trajectories
Dec 12, 2019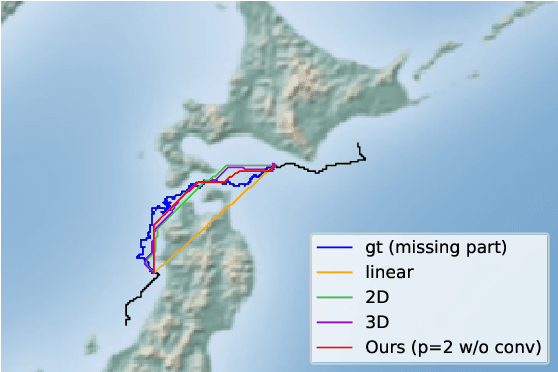
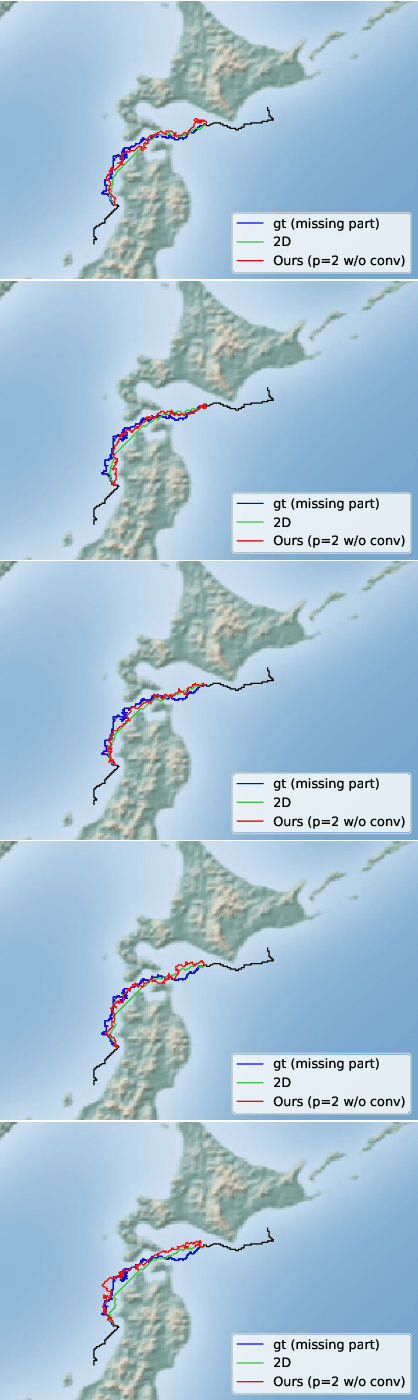
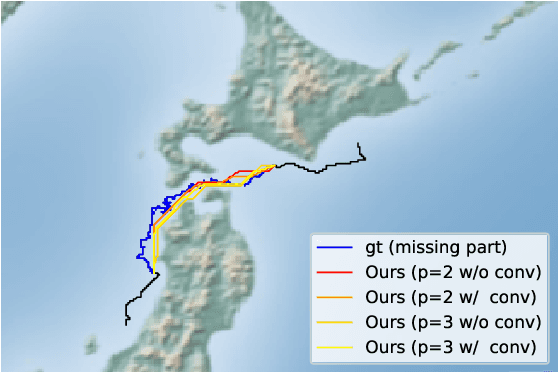
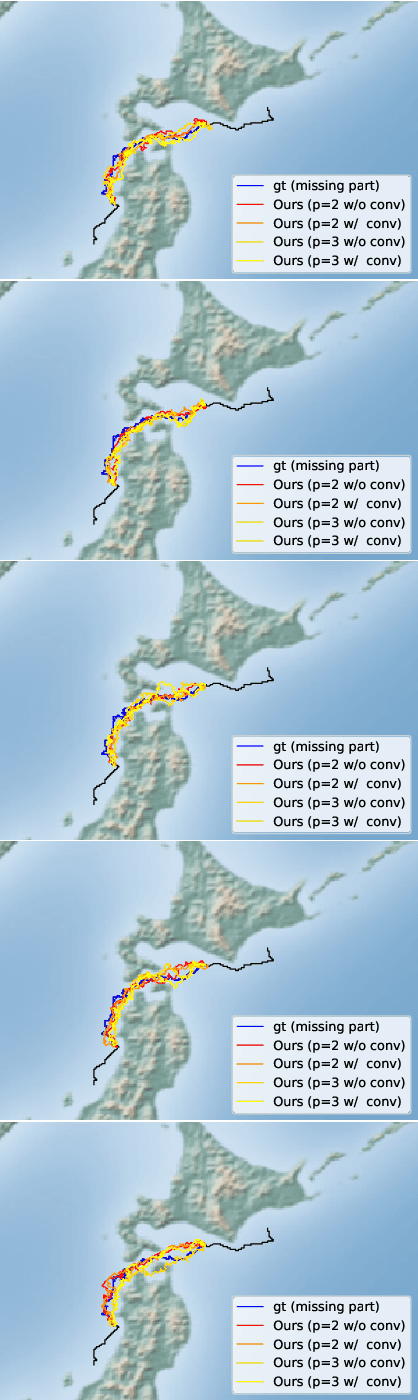
An efficient inverse reinforcement learning for generating trajectories is proposed based of 2D and 3D activity forecasting. We modify reward function with $L_p$ norm and propose convolution into value iteration steps, which is called convolutional value iteration. Experimental results with seabird trajectories (43 for training and 10 for test), our method is best in terms of MHD error and performs fastest. Generated trajectories for interpolating missing parts of trajectories look much similar to real seabird trajectories than those by the previous works.