 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeExperience is the Best Teacher: Grounding VLMs for Robotics through Self-Generated Memory
Jul 22, 2025Vision-language models (VLMs) have been widely adopted in robotics to enable autonomous planning. However, grounding VLMs, originally trained on internet data, to diverse real-world robots remains a challenge. This paper presents ExpTeach, a framework that grounds VLMs to physical robots by building a self-generated memory of real-world experiences. In ExpTeach, the VLM autonomously plans actions, verifies outcomes, reflects on failures, and adapts robot behaviors in a closed loop. The self-generated experiences during this process are then summarized into a long-term memory, enabling retrieval of learned knowledge to guide future tasks via retrieval-augmented generation (RAG). Additionally, ExpTeach enhances the spatial understanding of VLMs with an on-demand image annotation module. In experiments, we show that reflection improves success rates from 36% to 84% on four challenging robotic tasks and observe the emergence of intelligent object interactions, including creative tool use. Across extensive tests on 12 real-world scenarios (including eight unseen ones), we find that grounding with long-term memory boosts single-trial success rates from 22% to 80%, demonstrating the effectiveness and generalizability of ExpTeach.
IPPON: Common Sense Guided Informative Path Planning for Object Goal Navigation
Oct 25, 2024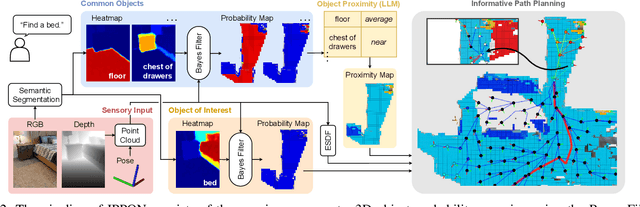
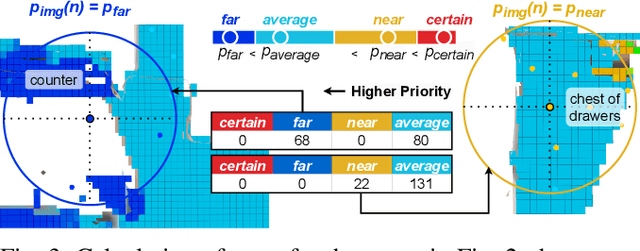
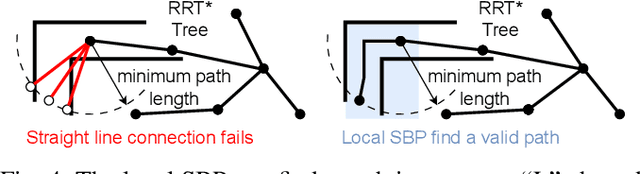
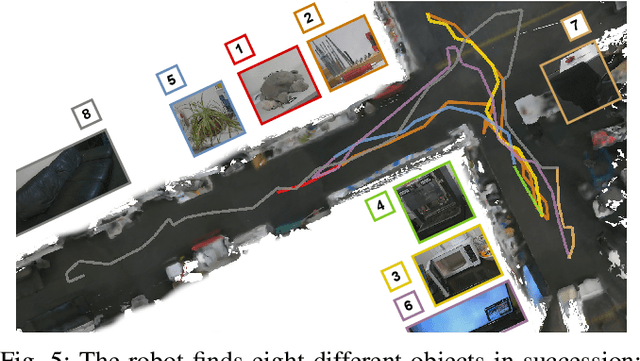
Navigating efficiently to an object in an unexplored environment is a critical skill for general-purpose intelligent robots. Recent approaches to this object goal navigation problem have embraced a modular strategy, integrating classical exploration algorithms-notably frontier exploration-with a learned semantic mapping/exploration module. This paper introduces a novel informative path planning and 3D object probability mapping approach. The mapping module computes the probability of the object of interest through semantic segmentation and a Bayes filter. Additionally, it stores probabilities for common objects, which semantically guides the exploration based on common sense priors from a large language model. The planner terminates when the current viewpoint captures enough voxels identified with high confidence as the object of interest. Although our planner follows a zero-shot approach, it achieves state-of-the-art performance as measured by the Success weighted by Path Length (SPL) and Soft SPL in the Habitat ObjectNav Challenge 2023, outperforming other works by more than 20%. Furthermore, we validate its effectiveness on real robots. Project webpage: https://ippon-paper.github.io/