 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEvoRoute: Experience-Driven Self-Routing LLM Agent Systems
Jan 06, 2026Complex agentic AI systems, powered by a coordinated ensemble of Large Language Models (LLMs), tool and memory modules, have demonstrated remarkable capabilities on intricate, multi-turn tasks. However, this success is shadowed by prohibitive economic costs and severe latency, exposing a critical, yet underexplored, trade-off. We formalize this challenge as the \textbf{Agent System Trilemma}: the inherent tension among achieving state-of-the-art performance, minimizing monetary cost, and ensuring rapid task completion. To dismantle this trilemma, we introduce EvoRoute, a self-evolving model routing paradigm that transcends static, pre-defined model assignments. Leveraging an ever-expanding knowledge base of prior experience, EvoRoute dynamically selects Pareto-optimal LLM backbones at each step, balancing accuracy, efficiency, and resource use, while continually refining its own selection policy through environment feedback. Experiments on challenging agentic benchmarks such as GAIA and BrowseComp+ demonstrate that EvoRoute, when integrated into off-the-shelf agentic systems, not only sustains or enhances system performance but also reduces execution cost by up to $80\%$ and latency by over $70\%$.
Intention-Based Lane Changing and Lane Keeping Haptic Guidance Steering System
Nov 15, 2020
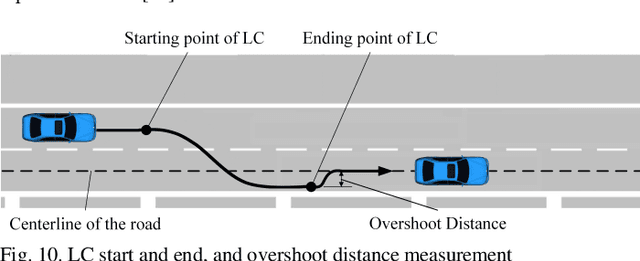
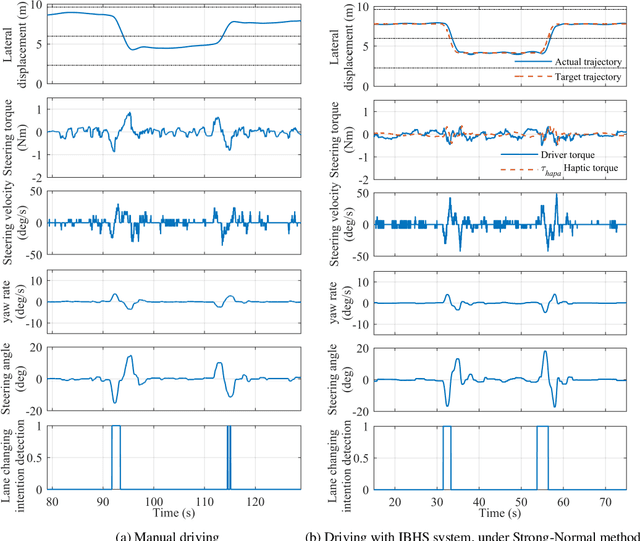
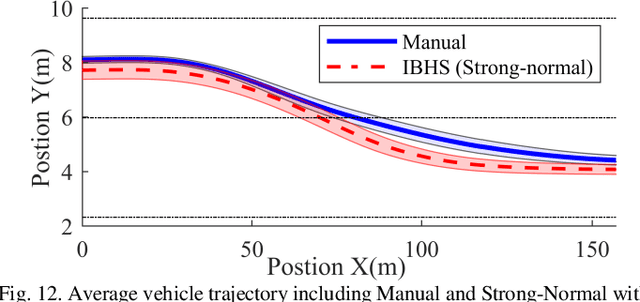
Haptic guidance in a shared steering assistance system has drawn significant attention in intelligent vehicle fields, owing to its mutual communication ability for vehicle control. By exerting continuous torque on the steering wheel, both the driver and support system can share lateral control of the vehicle. However, current haptic guidance steering systems demonstrate some deficiencies in assisting lane changing. This study explored a new steering interaction method, including the design and evaluation of an intention-based haptic shared steering system. Such an intention-based method can support both lane keeping and lane changing assistance, by detecting a driver lane change intention. By using a deep learning-based method to model a driver decision timing regarding lane crossing, an adaptive gain control method was proposed for realizing a steering control system. An intention consistency method was proposed to detect whether the driver and the system were acting towards the same target trajectories and to accurately capture the driver intention. A driving simulator experiment was conducted to test the system performance. Participants were required to perform six trials with assistive methods and one trial without assistance. The results demonstrated that the supporting system decreased the lane departure risk in the lane keeping tasks and could support a fast and stable lane changing maneuver.