 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIntention-Based Lane Changing and Lane Keeping Haptic Guidance Steering System
Nov 15, 2020
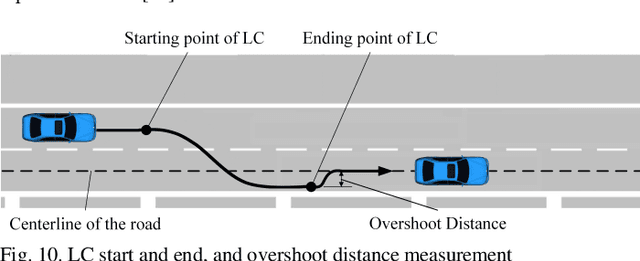
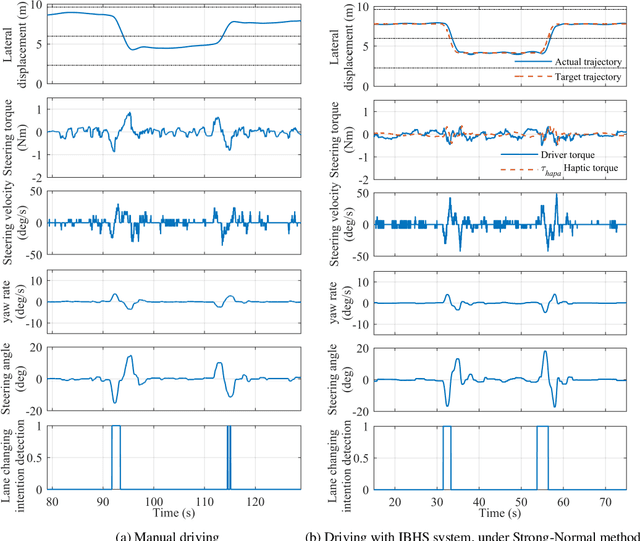
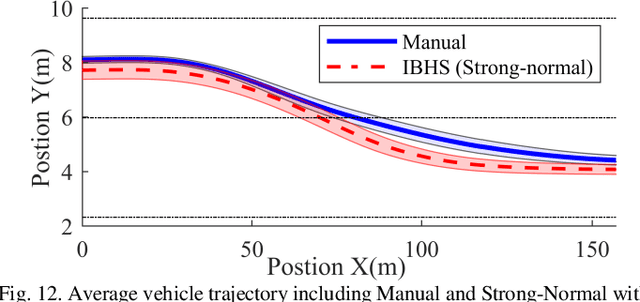
Haptic guidance in a shared steering assistance system has drawn significant attention in intelligent vehicle fields, owing to its mutual communication ability for vehicle control. By exerting continuous torque on the steering wheel, both the driver and support system can share lateral control of the vehicle. However, current haptic guidance steering systems demonstrate some deficiencies in assisting lane changing. This study explored a new steering interaction method, including the design and evaluation of an intention-based haptic shared steering system. Such an intention-based method can support both lane keeping and lane changing assistance, by detecting a driver lane change intention. By using a deep learning-based method to model a driver decision timing regarding lane crossing, an adaptive gain control method was proposed for realizing a steering control system. An intention consistency method was proposed to detect whether the driver and the system were acting towards the same target trajectories and to accurately capture the driver intention. A driving simulator experiment was conducted to test the system performance. Participants were required to perform six trials with assistive methods and one trial without assistance. The results demonstrated that the supporting system decreased the lane departure risk in the lane keeping tasks and could support a fast and stable lane changing maneuver.
Adaptive driver-automation shared steering control via forearm surface electromyography measurement
Sep 09, 2020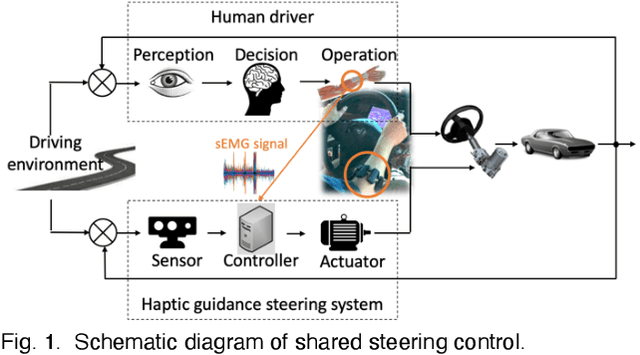
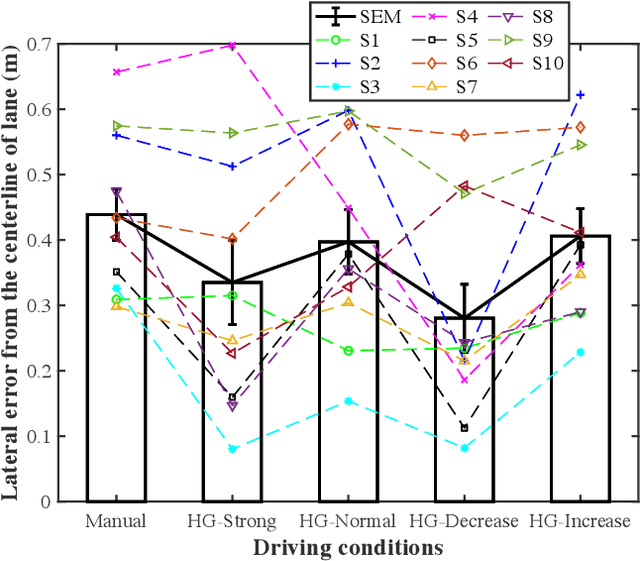
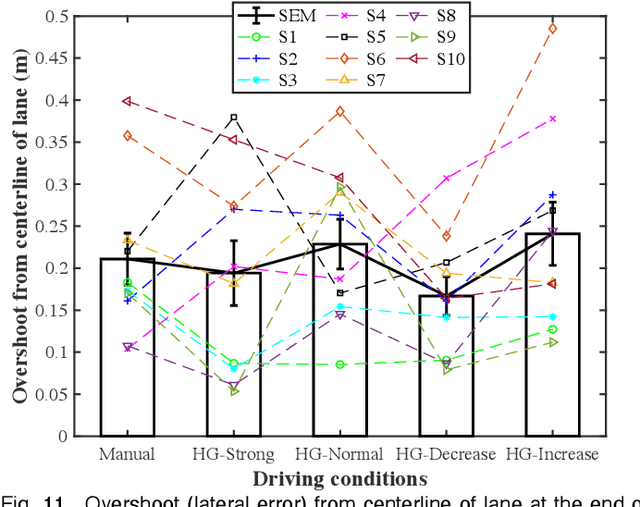
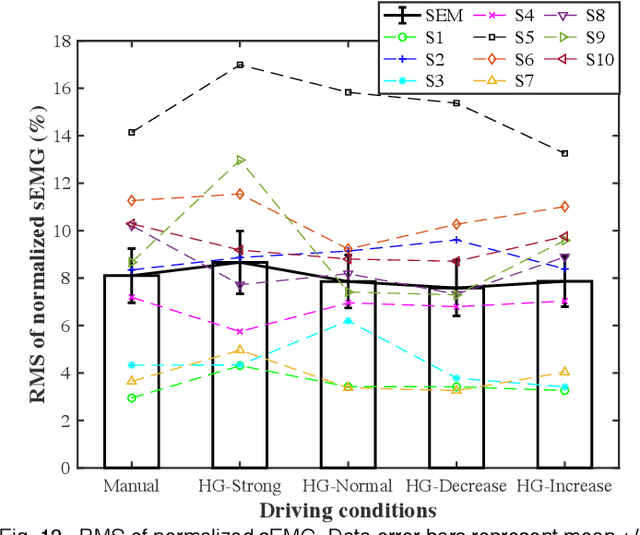
Shared steering control has been developed to reduce driver workload while keeping the driver in the control loop. A driver could integrate visual sensory information from the road ahead and haptic sensory information from the steering wheel to achieve better driving performance. Previous studies suggest that, compared with adaptive automation authority, fixed automation authority is not always appropriate with respect to human factors. This paper focuses on designing an adaptive shared steering control system via sEMG (surface electromyography) measurement from the forearm of the driver, and evaluates the effect of the system on driver behavior during a double lane change task. The shared steering control was achieved through a haptic guidance system which provided active assistance torque on the steering wheel. Ten subjects participated in a high-fidelity driving simulator experiment. Two types of adaptive algorithms were investigated: haptic guidance decreases when driver grip strength increases (HG-Decrease), and haptic guidance increases when driver grip strength increases (HG-Increase). These two algorithms were compared to manual driving and two levels of fixed authority haptic guidance, for a total of five experimental conditions. Evaluation of the driving systems was based on two sets of dependent variables: objective measures of driver behavior and subjective measures of driver workload. The results indicate that the adaptive authority of HG-Decrease yielded lower driver workload and reduced the lane departure risk compared to manual driving and fixed authority haptic guidance.