 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA Granular Framework for Construction Material Price Forecasting: Econometric and Machine-Learning Approaches
Dec 10, 2025The persistent volatility of construction material prices poses significant risks to cost estimation, budgeting, and project delivery, underscoring the urgent need for granular and scalable forecasting methods. This study develops a forecasting framework that leverages the Construction Specifications Institute (CSI) MasterFormat as the target data structure, enabling predictions at the six-digit section level and supporting detailed cost projections across a wide spectrum of building materials. To enhance predictive accuracy, the framework integrates explanatory variables such as raw material prices, commodity indexes, and macroeconomic indicators. Four time-series models, Long Short-Term Memory (LSTM), Autoregressive Integrated Moving Average (ARIMA), Vector Error Correction Model (VECM), and Chronos-Bolt, were evaluated under both baseline configurations (using CSI data only) and extended versions with explanatory variables. Results demonstrate that incorporating explanatory variables significantly improves predictive performance across all models. Among the tested approaches, the LSTM model consistently achieved the highest accuracy, with RMSE values as low as 1.390 and MAPE values of 0.957, representing improvements of up to 59\% over the traditional statistical time-series model, ARIMA. Validation across multiple CSI divisions confirmed the framework's scalability, while Division 06 (Wood, Plastics, and Composites) is presented in detail as a demonstration case. This research offers a robust methodology that enables owners and contractors to improve budgeting practices and achieve more reliable cost estimation at the Definitive level.
A New Framework for Nonlinear Kalman Filters
Jul 08, 2024



The Kalman filter (KF) is a state estimation algorithm that optimally combines system knowledge and measurements to minimize the mean squared error of the estimated states. While KF was initially designed for linear systems, numerous extensions of it, such as extended Kalman filter (EKF), unscented Kalman filter (UKF), cubature Kalman filter (CKF), etc., have been proposed for nonlinear systems. Although different types of nonlinear KFs have different pros and cons, they all use the same framework of linear KF, which, according to what we found in this paper, tends to give overconfident and less accurate state estimations when the measurement functions are nonlinear. Therefore, in this study, we designed a new framework for nonlinear KFs and showed theoretically and empirically that the new framework estimates the states and covariance matrix more accurately than the old one. The new framework was tested on four different nonlinear KFs and five different tasks, showcasing its ability to reduce the estimation errors by several orders of magnitude in low-measurement-noise conditions, with only about a 10 to 90% increase in computational time. All types of nonlinear KFs can benefit from the new framework, and the benefit will increase as the sensors become more and more accurate in the future. As an example, EKF, the simplest nonlinear KF that was previously believed to work poorly for strongly nonlinear systems, can now provide fast and fairly accurate state estimations with the help of the new framework. The codes are available at https://github.com/Shida-Jiang/A-new-framework-for-nonlinear-Kalman-filters.
Electric Vehicle Battery Remaining Charging Time Estimation Considering Charging Accuracy and Charging Profile Prediction
Dec 09, 2020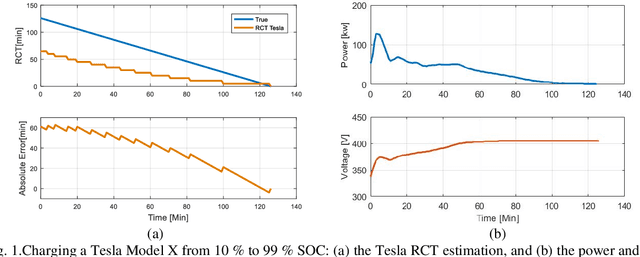
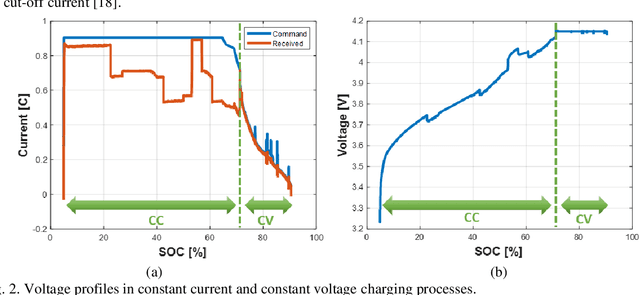
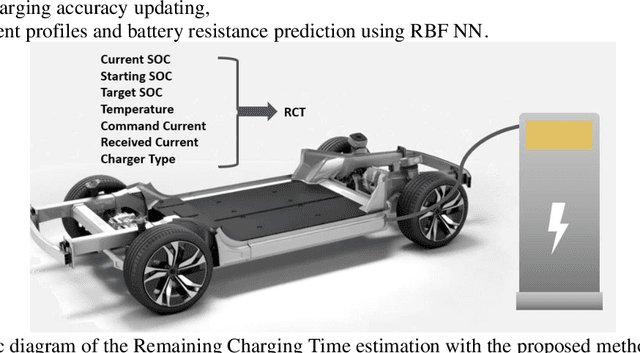
Electric vehicles (EVs) have been growing rapidly in popularity in recent years and have become a future trend. It is an important aspect of user experience to know the Remaining Charging Time (RCT) of an EV with confidence. However, it is difficult to find an algorithm that accurately estimates the RCT for vehicles in the current EV market. The maximum RCT estimation error of the Tesla Model X can be as high as 60 minutes from a 10 % to 99 % state-of-charge (SOC) while charging at direct current (DC). A highly accurate RCT estimation algorithm for electric vehicles is in high demand and will continue to be as EVs become more popular. There are currently two challenges to arriving at an accurate RCT estimate. First, most commercial chargers cannot provide requested charging currents during a constant current (CC) stage. Second, it is hard to predict the charging current profile in a constant voltage (CV) stage. To address the first issue, this study proposes an RCT algorithm that updates the charging accuracy online in the CC stage by considering the confidence interval between the historical charging accuracy and real-time charging accuracy data. To solve the second issue, this study proposes a battery resistance prediction model to predict charging current profiles in the CV stage, using a Radial Basis Function (RBF) neural network (NN). The test results demonstrate that the RCT algorithm proposed in this study achieves an error rate improvement of 73.6 % and 84.4 % over the traditional method in the CC and CV stages, respectively.
Cloud-Based Dynamic Programming for an Electric City Bus Energy Management Considering Real-Time Passenger Load Prediction
Oct 28, 2020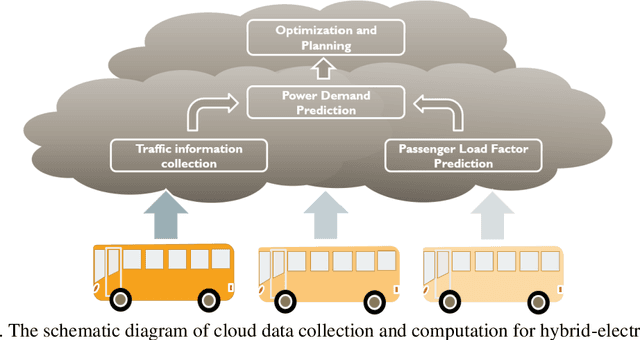


Electric city bus gains popularity in recent years for its low greenhouse gas emission, low noise level, etc. Different from a passenger car, the weight of a city bus varies significantly with different amounts of onboard passengers, which is not well studied in existing literature. This study proposes a passenger load prediction model using day-of-week, time-of-day, weather, temperatures, wind levels, and holiday information as inputs. The average model, Regression Tree, Gradient Boost Decision Tree, and Neural Networks models are compared in the passenger load prediction. The Gradient Boost Decision Tree model is selected due to its best accuracy and high stability. Given the predicted passenger load, dynamic programming algorithm determines the optimal power demand for supercapacitor and battery by optimizing the battery aging and energy usage in the cloud. Then rule extraction is conducted on dynamic programming results, and the rule is real-time loaded to onboard controllers of vehicles. The proposed cloud-based dynamic programming and rule extraction framework with the passenger load prediction shows 4% and 11% fewer bus operating costs in off-peak and peak hours, respectively. The operating cost by the proposed framework is less than 1% shy of the dynamic programming with the true passenger load information.
Learning Time Reduction Using Warm Start Methods for a Reinforcement Learning Based Supervisory Control in Hybrid Electric Vehicle Applications
Oct 27, 2020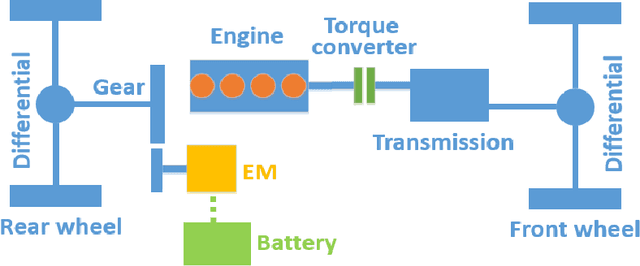
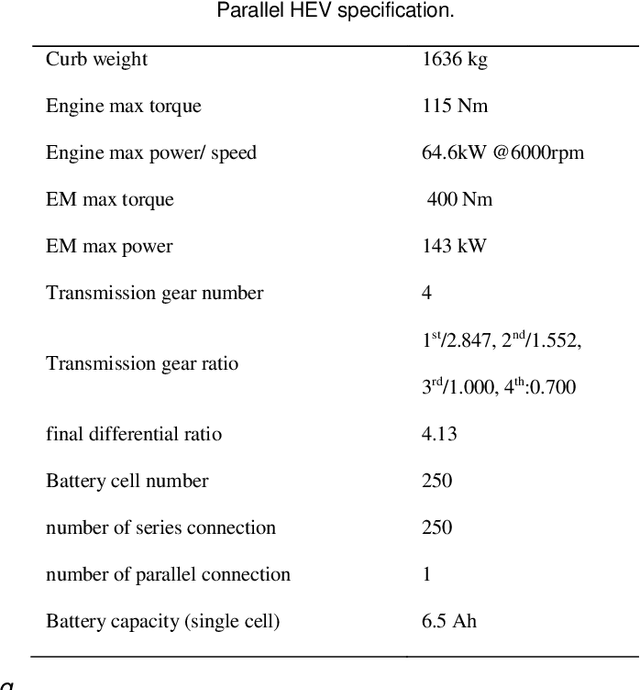
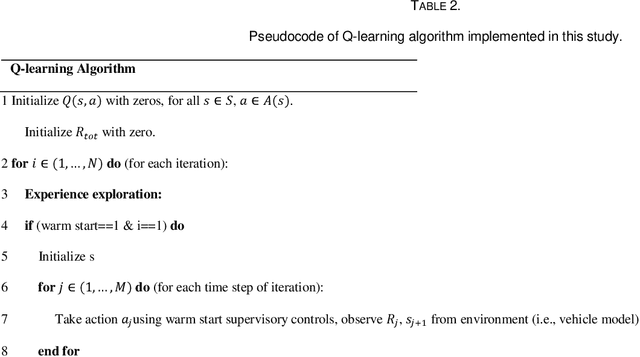
Reinforcement Learning (RL) is widely utilized in the field of robotics, and as such, it is gradually being implemented in the Hybrid Electric Vehicle (HEV) supervisory control. Even though RL exhibits excellent performance in terms of fuel consumption minimization in simulation, the large learning iteration number needs a long learning time, making it hardly applicable in real-world vehicles. In addition, the fuel consumption of initial learning phases is much worse than baseline controls. This study aims to reduce the learning iterations of Q-learning in HEV application and improve fuel consumption in initial learning phases utilizing warm start methods. Different from previous studies, which initiated Q-learning with zero or random Q values, this study initiates the Q-learning with different supervisory controls (i.e., Equivalent Consumption Minimization Strategy control and heuristic control), and detailed analysis is given. The results show that the proposed warm start Q-learning requires 68.8% fewer iterations than cold start Q-learning. The trained Q-learning is validated in two different driving cycles, and the results show 10-16% MPG improvement when compared to Equivalent Consumption Minimization Strategy control. Furthermore, real-time feasibility is analyzed, and the guidance of vehicle implementation is provided. The results of this study can be used to facilitate the deployment of RL in vehicle supervisory control applications.
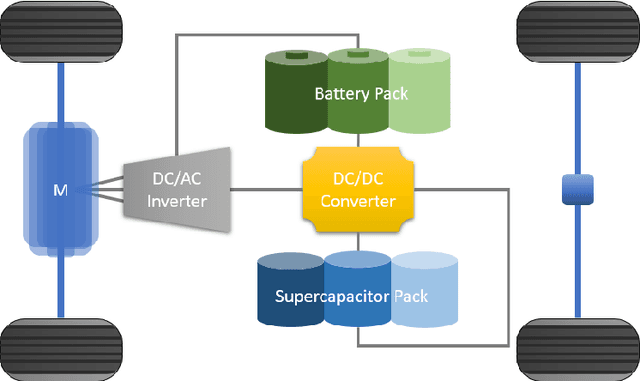
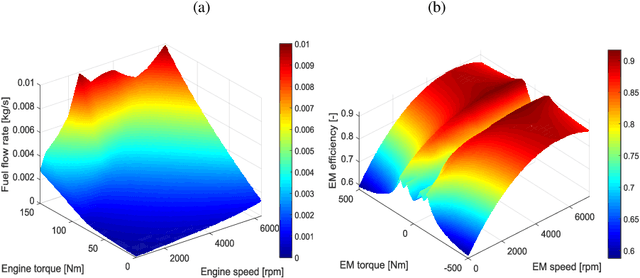
Energy Consumption and Battery Aging Minimization Using a Q-learning Strategy for a Battery/Ultracapacitor Electric Vehicle
Oct 27, 2020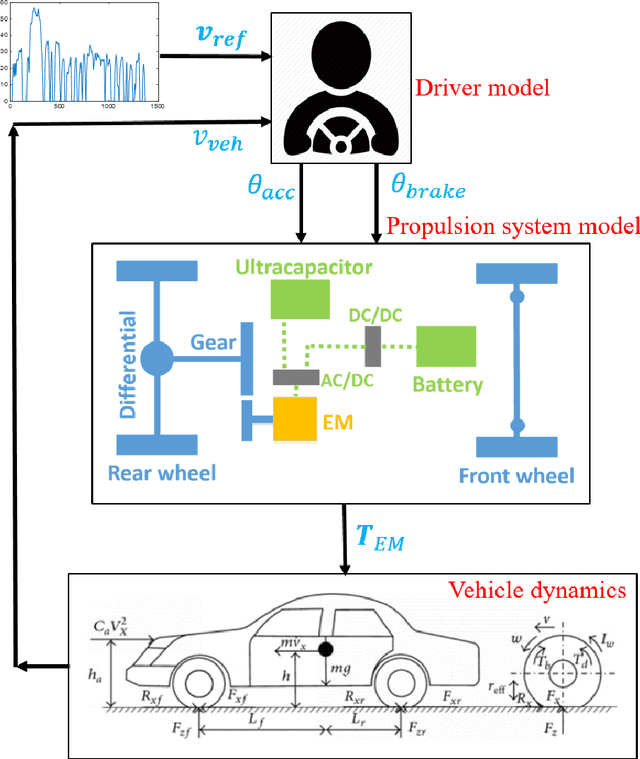

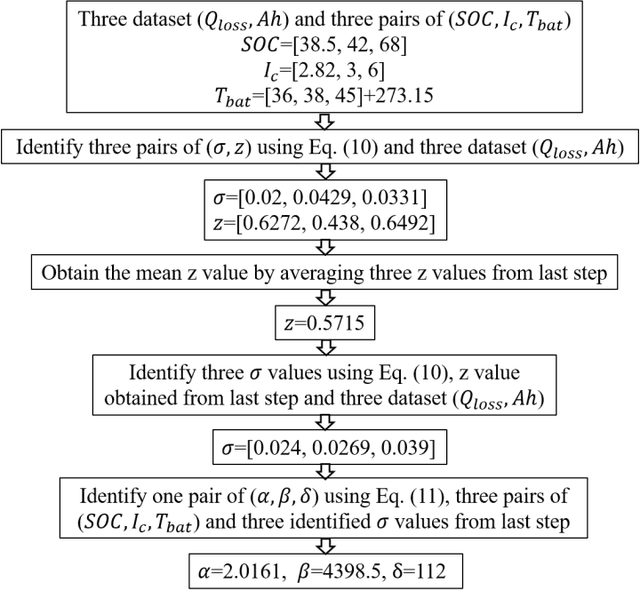
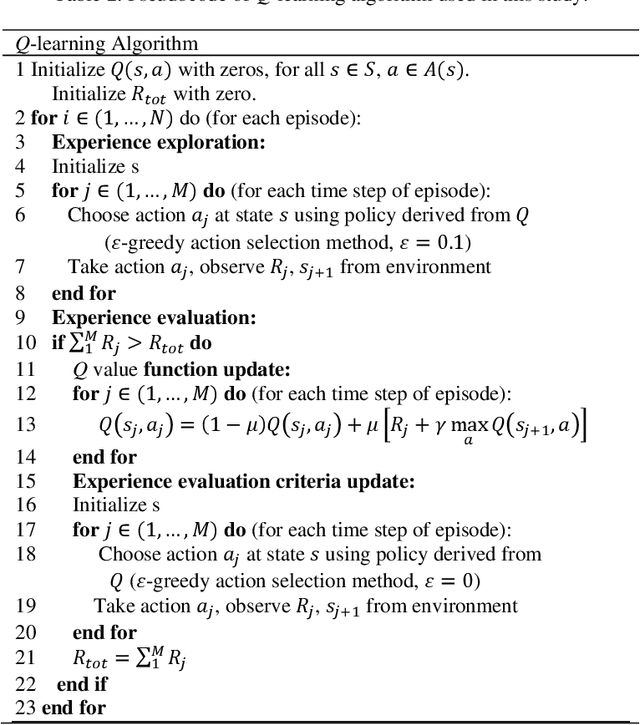
Propulsion system electrification revolution has been undergoing in the automotive industry. The electrified propulsion system improves energy efficiency and reduces the dependence on fossil fuel. However, the batteries of electric vehicles experience degradation process during vehicle operation. Research considering both battery degradation and energy consumption in battery/ supercapacitor electric vehicles is still lacking. This study proposes a Q-learning-based strategy to minimize battery degradation and energy consumption. Besides Q-learning, two heuristic energy management methods are also proposed and optimized using Particle Swarm Optimization algorithm. A vehicle propulsion system model is first presented, where the severity factor battery degradation model is considered and experimentally validated with the help of Genetic Algorithm. In the results analysis, Q-learning is first explained with the optimal policy map after learning. Then, the result from a vehicle without ultracapacitor is used as the baseline, which is compared with the results from the vehicle with ultracapacitor using Q-learning, and two heuristic methods as the energy management strategies. At the learning and validation driving cycles, the results indicate that the Q-learning strategy slows down the battery degradation by 13-20% and increases the vehicle range by 1.5-2% compared with the baseline vehicle without ultracapacitor.