 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOrchestrating Specialized Agents for Trustworthy Enterprise RAG
Jan 26, 2026Retrieval-Augmented Generation (RAG) shows promise for enterprise knowledge work, yet it often underperforms in high-stakes decision settings that require deep synthesis, strict traceability, and recovery from underspecified prompts. One-pass retrieval-and-write pipelines frequently yield shallow summaries, inconsistent grounding, and weak mechanisms for completeness verification. We introduce ADORE (Adaptive Deep Orchestration for Research in Enterprise), an agentic framework that replaces linear retrieval with iterative, user-steered investigation coordinated by a central orchestrator and a set of specialized agents. ADORE's key insight is that a structured Memory Bank (a curated evidence store with explicit claim-evidence linkage and section-level admissible evidence) enables traceable report generation and systematic checks for evidence completeness. Our contributions are threefold: (1) Memory-locked synthesis - report generation is constrained to a structured Memory Bank (Claim-Evidence Graph) with section-level admissible evidence, enabling traceable claims and grounded citations; (2) Evidence-coverage-guided execution - a retrieval-reflection loop audits section-level evidence coverage to trigger targeted follow-up retrieval and terminates via an evidence-driven stopping criterion; (3) Section-packed long-context grounding - section-level packing, pruning, and citation-preserving compression make long-form synthesis feasible under context limits. Across our evaluation suite, ADORE ranks first on DeepResearch Bench (52.65) and achieves the highest head-to-head preference win rate on DeepConsult (77.2%) against commercial systems.
Energy-Efficient Autonomous Driving Using Cognitive Driver Behavioral Models and Reinforcement Learning
Nov 27, 2021
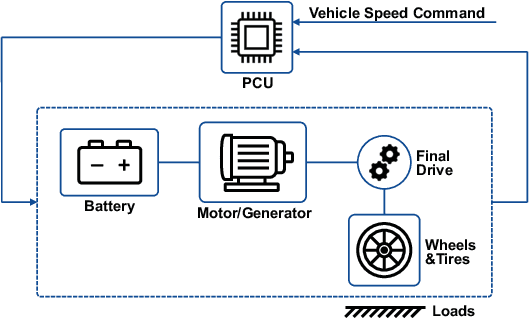
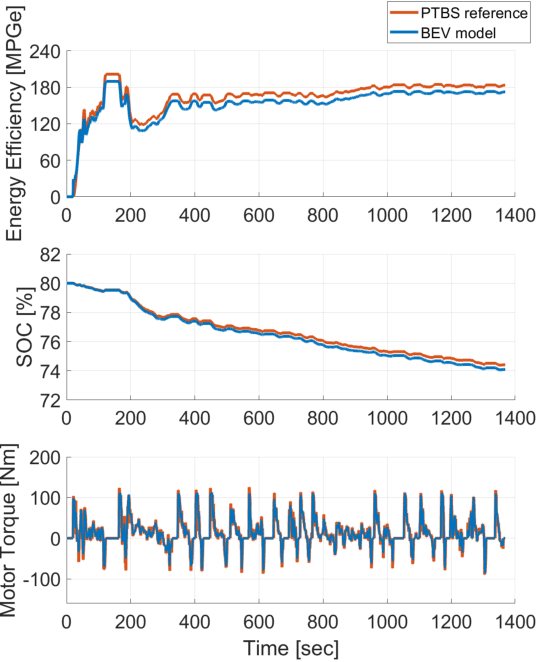
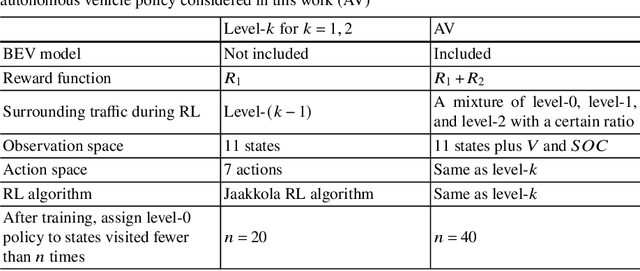
Autonomous driving technologies are expected to not only improve mobility and road safety but also bring energy efficiency benefits. In the foreseeable future, autonomous vehicles (AVs) will operate on roads shared with human-driven vehicles. To maintain safety and liveness while simultaneously minimizing energy consumption, the AV planning and decision-making process should account for interactions between the autonomous ego vehicle and surrounding human-driven vehicles. In this chapter, we describe a framework for developing energy-efficient autonomous driving policies on shared roads by exploiting human-driver behavior modeling based on cognitive hierarchy theory and reinforcement learning.
Frequency support Scheme based on parametrized power curve for de-loaded Wind Turbine under various wind speed
Aug 02, 2021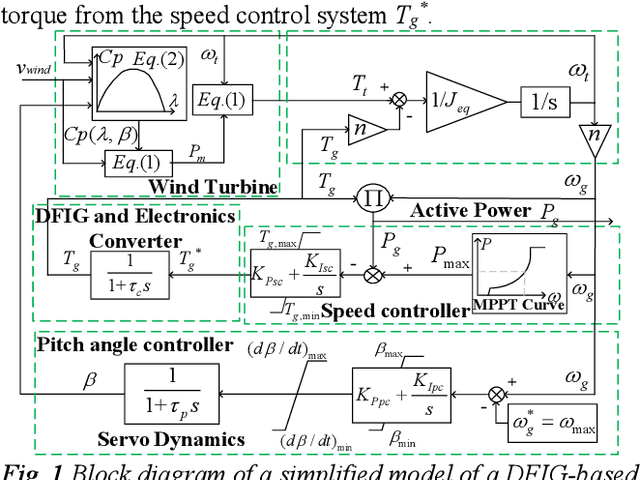
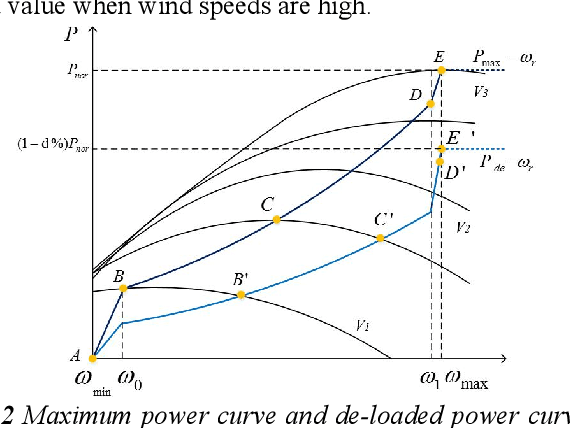
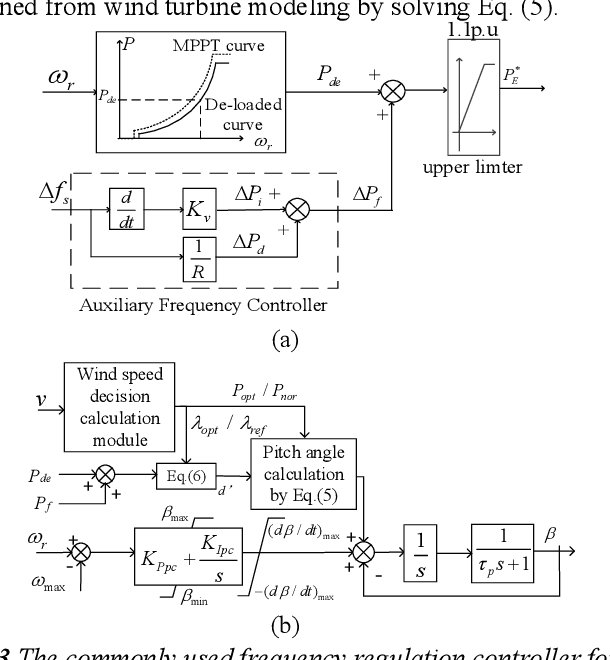
With increased wind power penetration in modern power systems, wind plants are required to provide frequency support similar to conventional plants. However, for the existing frequency regulation scheme of wind turbines, the control gains in the auxiliary frequency controller are difficult to set because of the compromise of the frequency regulation performance and the stable operation of wind turbines, especially when the wind speed remains variable. This paper proposes a novel frequency regulation scheme (FRS) for de-loaded wind turbines. Instead of an auxiliary frequency controller, frequency support is provided by modifying the parametrized power versus rotor speed curve, including the inertia power versus rotor speed curve and the droop power versus rotor speed curve. The advantage of the proposed scheme is that it does not contain any control gains and generally adapts to different wind speeds. Further, the proposed scheme can work for the whole section of wind speed without wind speed measurement information. The compared simulation results demonstrate the scheme improves the system frequency response while ensuring the stable operation of doubly-fed induction generators (DFIGs)-based variable-speed wind turbines (VSWTs) under various wind conditions. Furthermore, the scheme prevents rotor speed overdeceleration even when the wind speed decreases during frequency regulation control.
Virtual synchronous generator of PV generation without energy storage for frequency support in autonomous microgrid
Jul 04, 2021
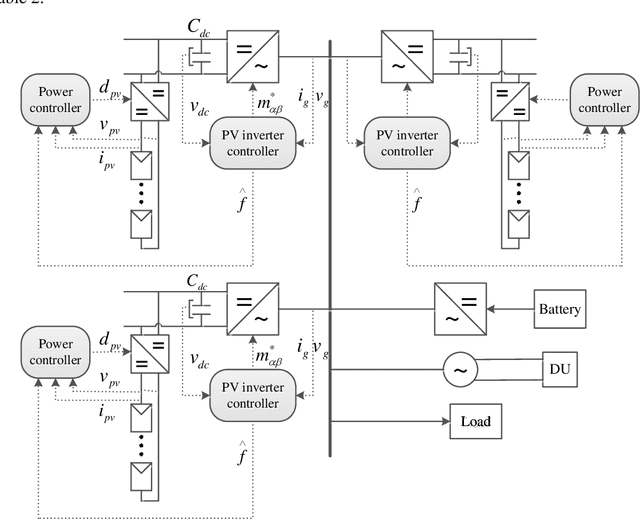
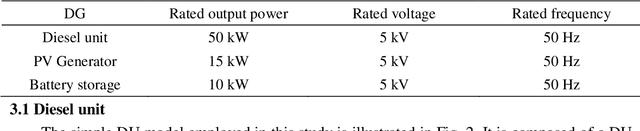
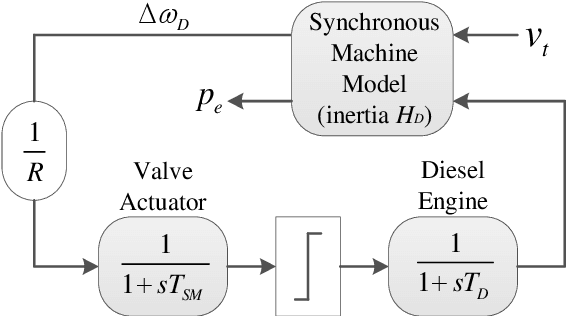
In autonomous microgrids frequency regulation (FR) is a critical issue, especially with a high level of penetration of the photovoltaic (PV) generation. In this study, a novel virtual synchronous generator (VSG) control for PV generation was introduced to provide frequency support without energy storage. PV generation reserve a part of the active power in accordance with the pre-defined power versus voltage curve. Based on the similarities of the synchronous generator power-angle characteristic curve and the PV array characteristic curve, PV voltage Vpv can be analogized to the power angle {\delta}. An emulated governor (droop control) and the swing equation control is designed and applied to the DC-DC converter. PV voltage deviation is subsequently generated and the pre-defined power versus voltage curve is modified to provide the primary frequency and inertia support. A simulation model of an autonomous microgrid with PV, storage, and diesel generator was built. The feasibility and effectiveness of the proposed VSG strategy are examined under different operating conditions.
Learning Time Reduction Using Warm Start Methods for a Reinforcement Learning Based Supervisory Control in Hybrid Electric Vehicle Applications
Oct 27, 2020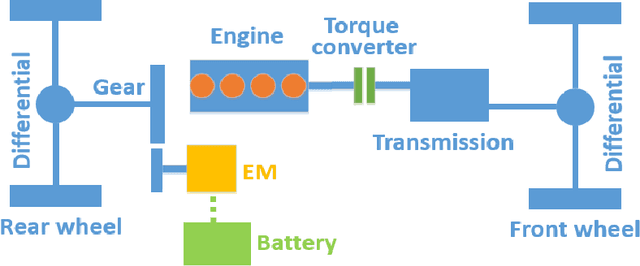
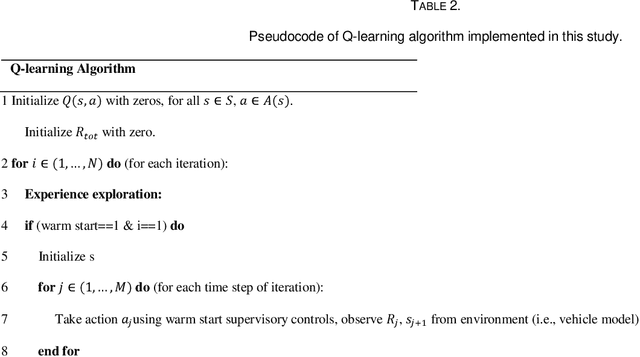
Reinforcement Learning (RL) is widely utilized in the field of robotics, and as such, it is gradually being implemented in the Hybrid Electric Vehicle (HEV) supervisory control. Even though RL exhibits excellent performance in terms of fuel consumption minimization in simulation, the large learning iteration number needs a long learning time, making it hardly applicable in real-world vehicles. In addition, the fuel consumption of initial learning phases is much worse than baseline controls. This study aims to reduce the learning iterations of Q-learning in HEV application and improve fuel consumption in initial learning phases utilizing warm start methods. Different from previous studies, which initiated Q-learning with zero or random Q values, this study initiates the Q-learning with different supervisory controls (i.e., Equivalent Consumption Minimization Strategy control and heuristic control), and detailed analysis is given. The results show that the proposed warm start Q-learning requires 68.8% fewer iterations than cold start Q-learning. The trained Q-learning is validated in two different driving cycles, and the results show 10-16% MPG improvement when compared to Equivalent Consumption Minimization Strategy control. Furthermore, real-time feasibility is analyzed, and the guidance of vehicle implementation is provided. The results of this study can be used to facilitate the deployment of RL in vehicle supervisory control applications.
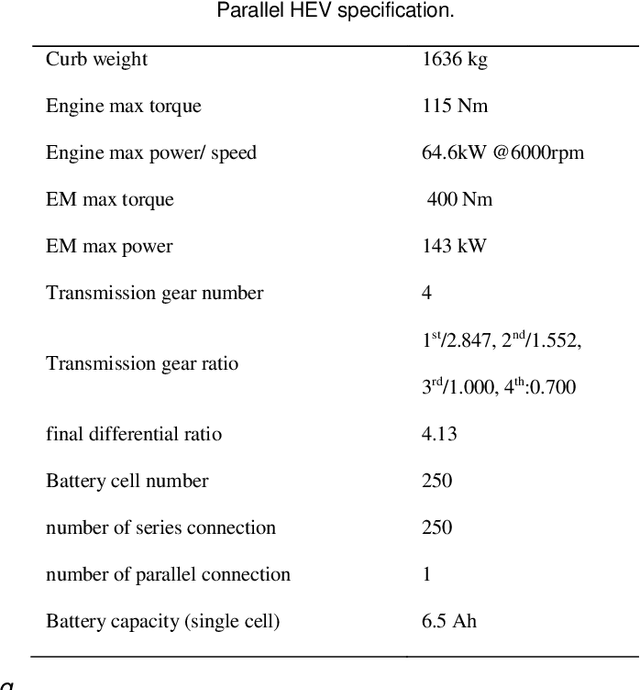
Energy Consumption and Battery Aging Minimization Using a Q-learning Strategy for a Battery/Ultracapacitor Electric Vehicle
Oct 27, 2020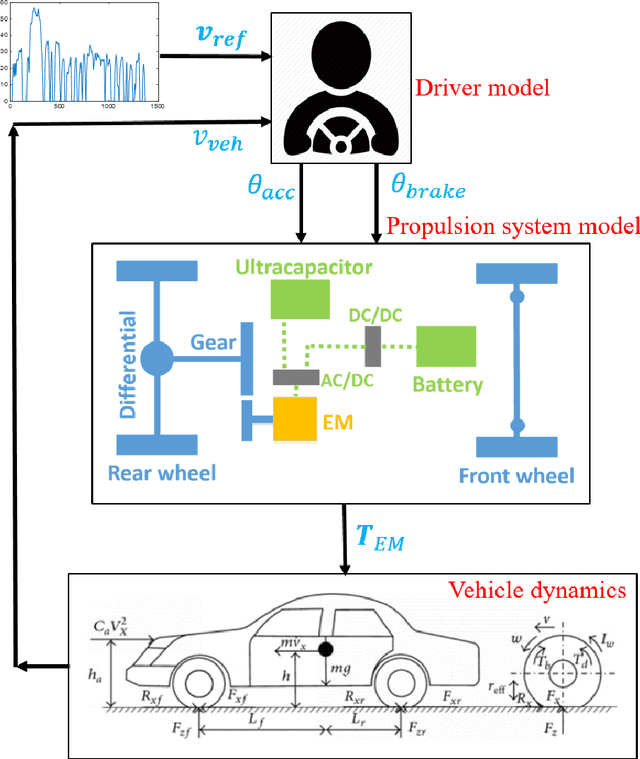

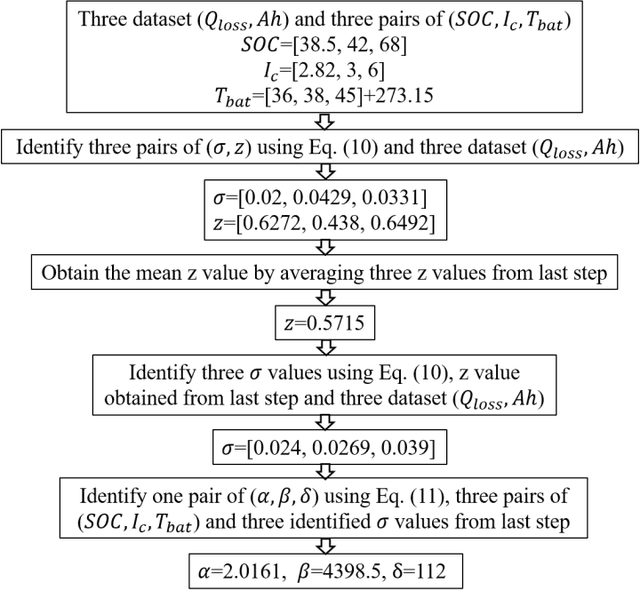
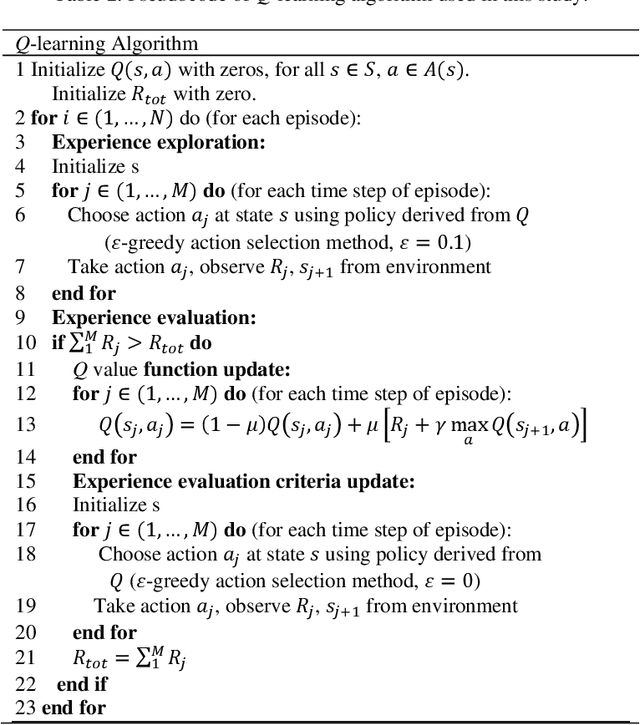
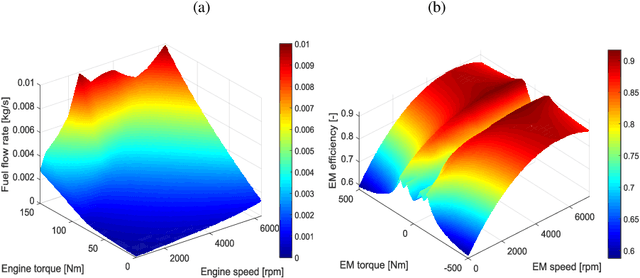
Propulsion system electrification revolution has been undergoing in the automotive industry. The electrified propulsion system improves energy efficiency and reduces the dependence on fossil fuel. However, the batteries of electric vehicles experience degradation process during vehicle operation. Research considering both battery degradation and energy consumption in battery/ supercapacitor electric vehicles is still lacking. This study proposes a Q-learning-based strategy to minimize battery degradation and energy consumption. Besides Q-learning, two heuristic energy management methods are also proposed and optimized using Particle Swarm Optimization algorithm. A vehicle propulsion system model is first presented, where the severity factor battery degradation model is considered and experimentally validated with the help of Genetic Algorithm. In the results analysis, Q-learning is first explained with the optimal policy map after learning. Then, the result from a vehicle without ultracapacitor is used as the baseline, which is compared with the results from the vehicle with ultracapacitor using Q-learning, and two heuristic methods as the energy management strategies. At the learning and validation driving cycles, the results indicate that the Q-learning strategy slows down the battery degradation by 13-20% and increases the vehicle range by 1.5-2% compared with the baseline vehicle without ultracapacitor.