 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSTOP: Spatiotemporal Orthogonal Propagation for Weight-Threshold-Leakage Synergistic Training of Deep Spiking Neural Networks
Nov 17, 2024



The prevailing of artificial intelligence-of-things calls for higher energy-efficient edge computing paradigms, such as neuromorphic agents leveraging brain-inspired spiking neural network (SNN) models based on spatiotemporally sparse binary activations. However, the lack of efficient and high-accuracy deep SNN learning algorithms prevents them from practical edge deployments with a strictly bounded cost. In this paper, we propose a spatiotemporal orthogonal propagation (STOP) algorithm to tack this challenge. Our algorithm enables fully synergistic learning of synaptic weights as well as firing thresholds and leakage factors in spiking neurons to improve SNN accuracy, while under a unified temporally-forward trace-based framework to mitigate the huge memory requirement for storing neural states of all time-steps in the forward pass. Characteristically, the spatially-backward neuronal errors and temporally-forward traces propagate orthogonally to and independently of each other, substantially reducing computational overhead. Our STOP algorithm obtained high recognition accuracies of 99.53%, 94.84%, 74.92%, 98.26% and 77.10% on the MNIST, CIFAR-10, CIFAR-100, DVS-Gesture and DVS-CIFAR10 datasets with adequate SNNs of intermediate scales from LeNet-5 to ResNet-18. Compared with other deep SNN training works, our method is more plausible for edge intelligent scenarios where resources are limited but high-accuracy in-situ learning is desired.
Electric Vehicle Battery Remaining Charging Time Estimation Considering Charging Accuracy and Charging Profile Prediction
Dec 09, 2020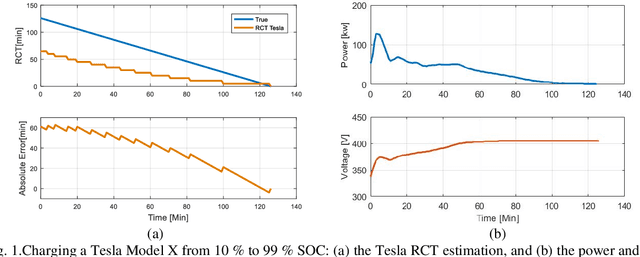
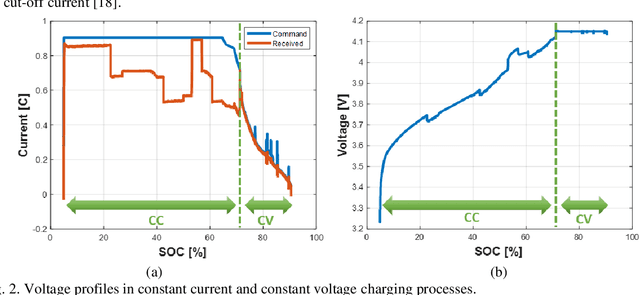
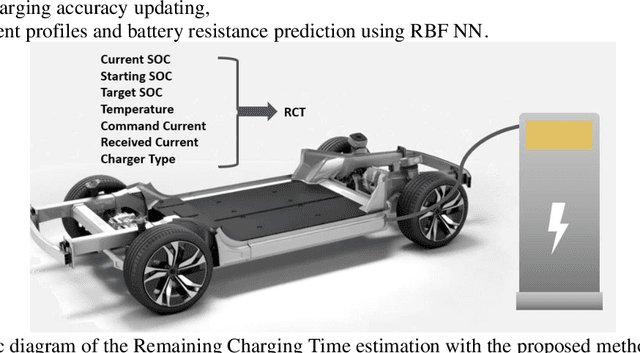
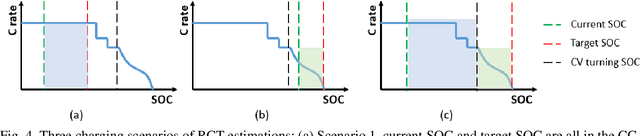
Electric vehicles (EVs) have been growing rapidly in popularity in recent years and have become a future trend. It is an important aspect of user experience to know the Remaining Charging Time (RCT) of an EV with confidence. However, it is difficult to find an algorithm that accurately estimates the RCT for vehicles in the current EV market. The maximum RCT estimation error of the Tesla Model X can be as high as 60 minutes from a 10 % to 99 % state-of-charge (SOC) while charging at direct current (DC). A highly accurate RCT estimation algorithm for electric vehicles is in high demand and will continue to be as EVs become more popular. There are currently two challenges to arriving at an accurate RCT estimate. First, most commercial chargers cannot provide requested charging currents during a constant current (CC) stage. Second, it is hard to predict the charging current profile in a constant voltage (CV) stage. To address the first issue, this study proposes an RCT algorithm that updates the charging accuracy online in the CC stage by considering the confidence interval between the historical charging accuracy and real-time charging accuracy data. To solve the second issue, this study proposes a battery resistance prediction model to predict charging current profiles in the CV stage, using a Radial Basis Function (RBF) neural network (NN). The test results demonstrate that the RCT algorithm proposed in this study achieves an error rate improvement of 73.6 % and 84.4 % over the traditional method in the CC and CV stages, respectively.