 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSenseRAG: Constructing Environmental Knowledge Bases with Proactive Querying for LLM-Based Autonomous Driving
Jan 08, 2025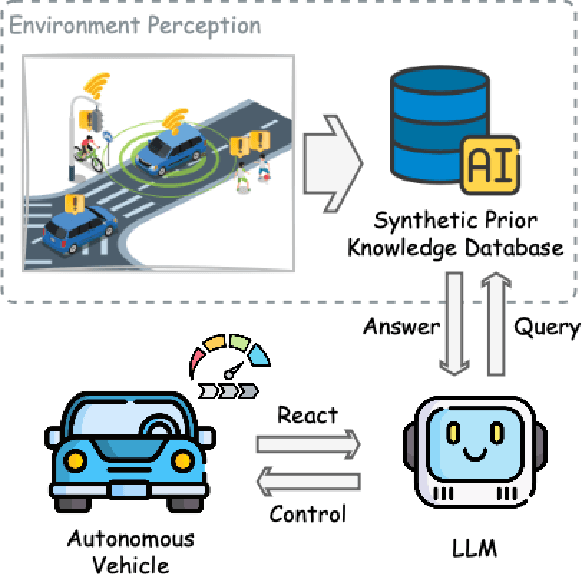
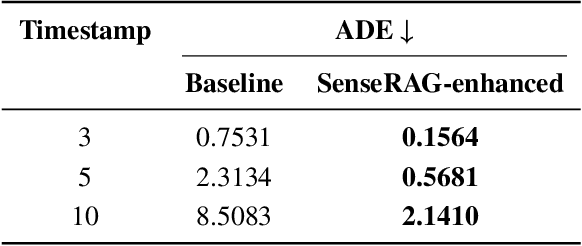
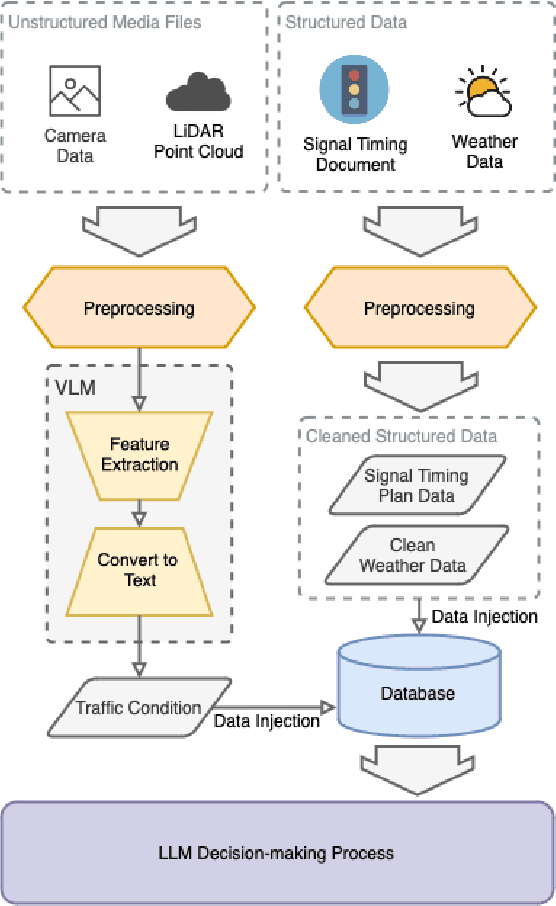
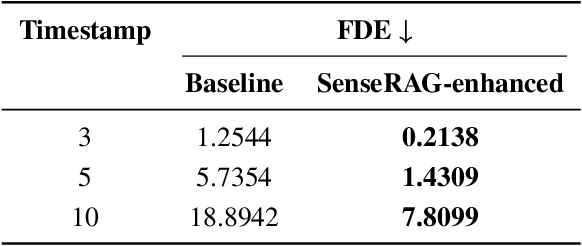
This study addresses the critical need for enhanced situational awareness in autonomous driving (AD) by leveraging the contextual reasoning capabilities of large language models (LLMs). Unlike traditional perception systems that rely on rigid, label-based annotations, it integrates real-time, multimodal sensor data into a unified, LLMs-readable knowledge base, enabling LLMs to dynamically understand and respond to complex driving environments. To overcome the inherent latency and modality limitations of LLMs, a proactive Retrieval-Augmented Generation (RAG) is designed for AD, combined with a chain-of-thought prompting mechanism, ensuring rapid and context-rich understanding. Experimental results using real-world Vehicle-to-everything (V2X) datasets demonstrate significant improvements in perception and prediction performance, highlighting the potential of this framework to enhance safety, adaptability, and decision-making in next-generation AD systems.
PKRD-CoT: A Unified Chain-of-thought Prompting for Multi-Modal Large Language Models in Autonomous Driving
Dec 02, 2024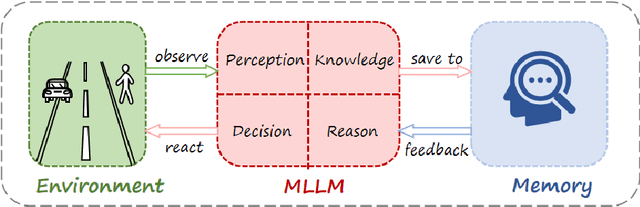
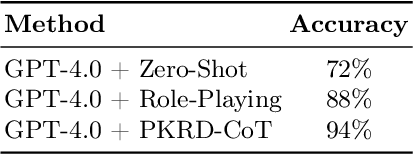
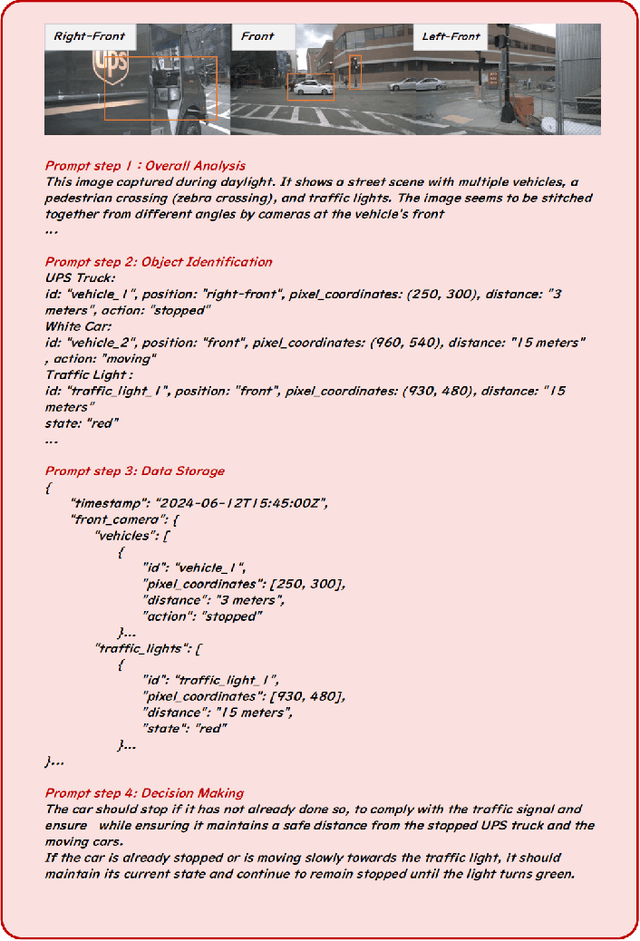
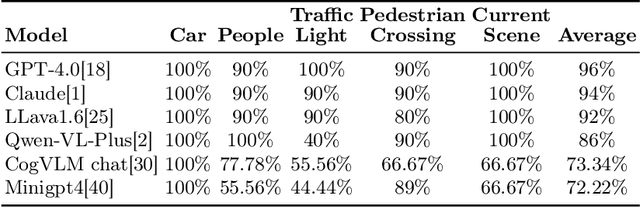
There is growing interest in leveraging the capabilities of robust Multi-Modal Large Language Models (MLLMs) directly within autonomous driving contexts. However, the high costs and complexity of designing and training end-to-end autonomous driving models make them challenging for many enterprises and research entities. To address this, our study explores a seamless integration of MLLMs into autonomous driving systems by proposing a Zero-Shot Chain-of-Thought (Zero-Shot-CoT) prompt design named PKRD-CoT. PKRD-CoT is based on the four fundamental capabilities of autonomous driving: perception, knowledge, reasoning, and decision-making. This makes it particularly suitable for understanding and responding to dynamic driving environments by mimicking human thought processes step by step, thus enhancing decision-making in real-time scenarios. Our design enables MLLMs to tackle problems without prior experience, thereby increasing their utility within unstructured autonomous driving environments. In experiments, we demonstrate the exceptional performance of GPT-4.0 with PKRD-CoT across autonomous driving tasks, highlighting its effectiveness in autonomous driving scenarios. Additionally, our benchmark analysis reveals the promising viability of PKRD-CoT for other MLLMs, such as Claude, LLava1.6, and Qwen-VL-Plus. Overall, this study contributes a novel and unified prompt-design framework for GPT-4.0 and other MLLMs in autonomous driving, while also rigorously evaluating the efficacy of these widely recognized MLLMs in the autonomous driving domain through comprehensive comparisons.