 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeIndependent Mobility GPT (IDM-GPT): A Self-Supervised Multi-Agent Large Language Model Framework for Customized Traffic Mobility Analysis Using Machine Learning Models
Feb 25, 2025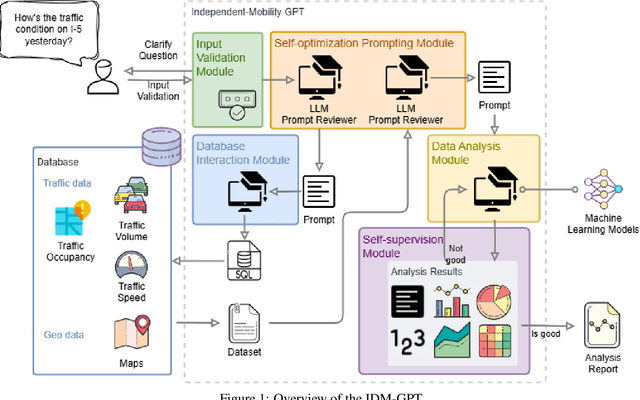



With the urbanization process, an increasing number of sensors are being deployed in transportation systems, leading to an explosion of big data. To harness the power of this vast transportation data, various machine learning (ML) and artificial intelligence (AI) methods have been introduced to address numerous transportation challenges. However, these methods often require significant investment in data collection, processing, storage, and the employment of professionals with expertise in transportation and ML. Additionally, privacy issues are a major concern when processing data for real-world traffic control and management. To address these challenges, the research team proposes an innovative Multi-agent framework named Independent Mobility GPT (IDM-GPT) based on large language models (LLMs) for customized traffic analysis, management suggestions, and privacy preservation. IDM-GPT efficiently connects users, transportation databases, and ML models economically. IDM-GPT trains, customizes, and applies various LLM-based AI agents for multiple functions, including user query comprehension, prompts optimization, data analysis, model selection, and performance evaluation and enhancement. With IDM-GPT, users without any background in transportation or ML can efficiently and intuitively obtain data analysis and customized suggestions in near real-time based on their questions. Experimental results demonstrate that IDM-GPT delivers satisfactory performance across multiple traffic-related tasks, providing comprehensive and actionable insights that support effective traffic management and urban mobility improvement.
SenseRAG: Constructing Environmental Knowledge Bases with Proactive Querying for LLM-Based Autonomous Driving
Jan 08, 2025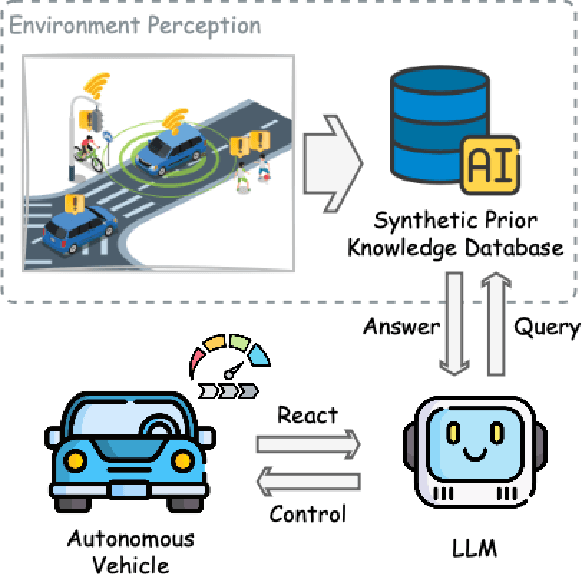
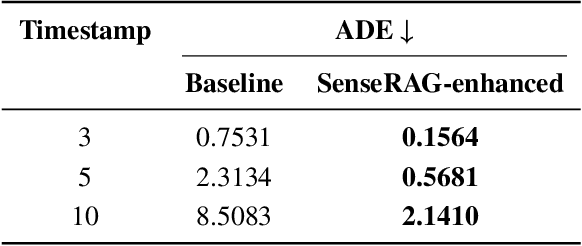
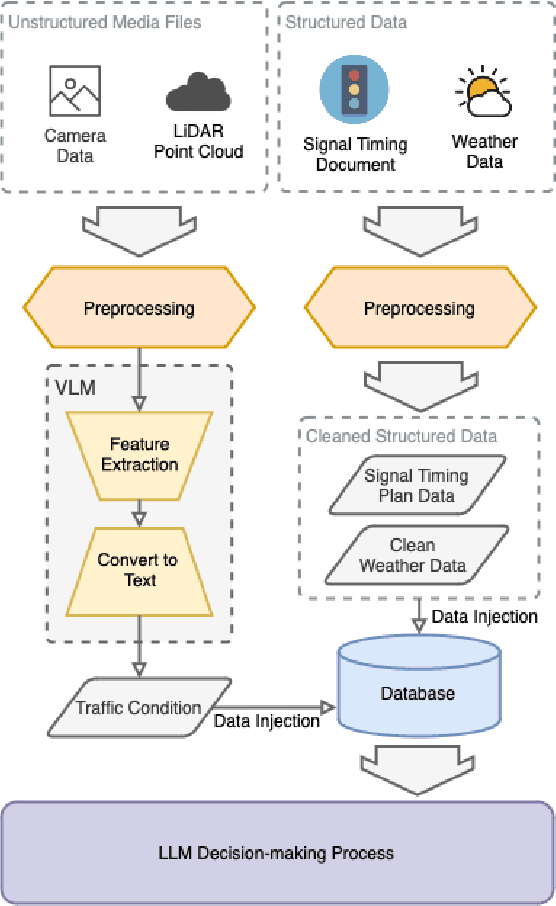
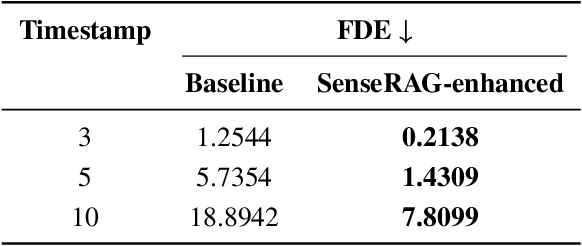
This study addresses the critical need for enhanced situational awareness in autonomous driving (AD) by leveraging the contextual reasoning capabilities of large language models (LLMs). Unlike traditional perception systems that rely on rigid, label-based annotations, it integrates real-time, multimodal sensor data into a unified, LLMs-readable knowledge base, enabling LLMs to dynamically understand and respond to complex driving environments. To overcome the inherent latency and modality limitations of LLMs, a proactive Retrieval-Augmented Generation (RAG) is designed for AD, combined with a chain-of-thought prompting mechanism, ensuring rapid and context-rich understanding. Experimental results using real-world Vehicle-to-everything (V2X) datasets demonstrate significant improvements in perception and prediction performance, highlighting the potential of this framework to enhance safety, adaptability, and decision-making in next-generation AD systems.